
10 دقیقه
شرکت CATL بهطور آهسته و بدون هیاهو رباتهای انساننما را از مرحله نمایشهای آزمایشی به کار واقعی در کارخانه منتقل کرده و ربات Moz را در سراسر یک خط بستهبندی باتری بهکار گرفته است. این اقدام نشان میدهد که هوش متجسم (embodied intelligence) ممکن است سرانجام برای نقشهای حساس به کیفیت در تولید خودروهای الکتریکی آماده شده باشد. استفاده از رباتهای انساننما در خط تولید میتواند بر شاخصهای کیفیت، تکرارپذیری و بهرهوری تأثیر مستقیم بگذارد و نشان میدهد اتوماسیون صنعتی در حال فراتر رفتن از وظایف ساده است.
Moz وارد خط تولید میشود — نه فقط برای نمایش
این ربات انساننما که «Moz» نام دارد توسط Spirit AI، شاخه رباتیک شرکت CATL توسعه یافته است. برخلاف بسیاری از دموهایی که برای جلب توجه رسانهها طراحی میشوند، CATL گزارش داده است که استقرار در مقیاس بزرگ Moz را در یک کارخانه تولید باتری توان عملیاتی تکمیل کرده است؛ این یعنی این یکی از نخستین خطوط تولید است که بهصورت گسترده از رباتهای «هوش متجسم» انساننما استفاده میکند. این حرکت نشانگر جهشی از نمونههای آزمایشی و نمایشهای مفهومی به سوی پیادهسازی صنعتی واقعی است که باید معیارهای سختگیرانه کیفیت و قابلیت اطمینان را رعایت کند.
در حالی که بسیاری از رباتهای صنعتی سنتی برای وظایف تکراری مانند برداشتن و قرار دادن قطعات (pick-and-place) بهینه شدهاند، Moz در بخشهایی از فرایند مستقر شده است که دقت و قابلیت اطمینان در آنها غیرقابل معامله است. این تغییر معنادار بهمعنای انتقال از حرکات نمایشی و مفاهیم اولیه به ماشینهایی است که بهطور مستقیم بر کیفیت محصول و درآمد تأثیر میگذارند. به عبارت دیگر، Moz فراتر از یک نمونه آزمایشی است و بهعنوان یک عامل عملیاتی در زنجیره تولید عمل میکند که میتواند ثبات فرآیند را افزایش دهد و خطای انسانی را در مراحل حساس کاهش دهد.
دقت در نقاط حساس: مونتاژ کانکتورها و بینایی تطبیقی
وظیفه اصلی Moz اتصال کانکتورهای باتری است؛ کاری که دستکم گرفته میشود اما از نظر فنی بسیار چالشبرانگیز است. این کار به تراز دقیق، حرکت یکسان و کنترل دقیق نیروی اعمالشده نیاز دارد تا اتصالات درست صورت گیرد بدون آن که به سیمکشی یا اجزای ظریف آسیب وارد شود. CATL گزارش میدهد که Moz در وارد کردن کانکتورها نرخ موفقیت 99٪ را ثبت کرده که این عملکرد را با اپراتورهای انسانی با تجربه قابل مقایسه میداند. نرخ موفقیت بالا در چنین عملیات دقیقی نشاندهنده ترکیبی از سختافزار پیشرفته، الگوریتمهای کنترل و سیستمهای بینایی دقیق است.
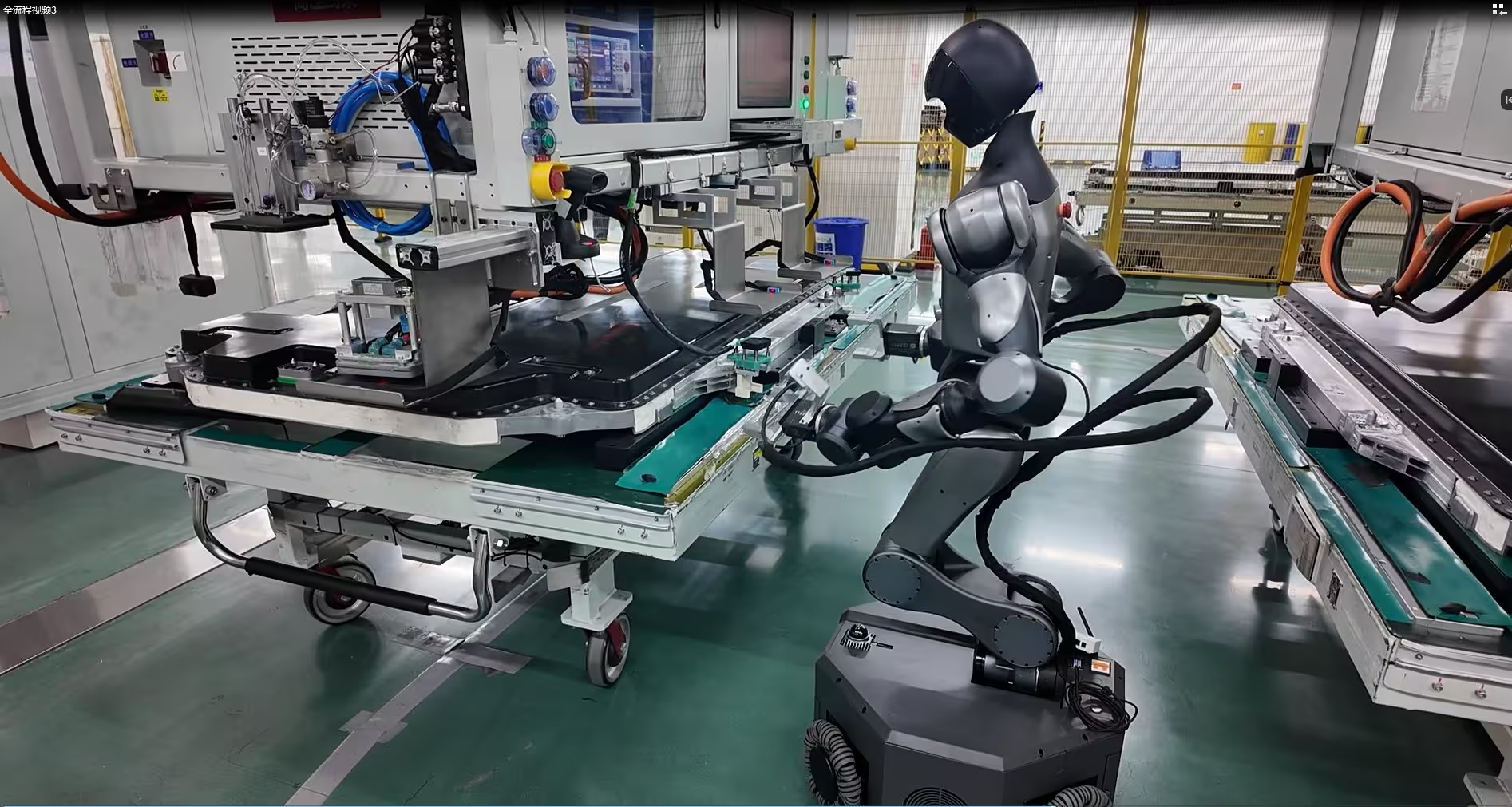
این دقت تصادفی نیست. Moz یک سیستم بینایی end-to-end را با تنظیمات وضعیت بدن در زمان واقعی (real-time posture adjustments) و پایش نیرو (force monitoring) ترکیب میکند. اگر مواد کمی جابجا شده باشند یا نقطه اتصال تغییر کند، ربات در لحظه سازگار میشود — جهت و گِرف (grip) خود را تغییر میدهد و فشار وارده را تعدیل میکند تا مجموعههای سیمکشی را بدون آسیب رساندن به قطعات حساس محکم کند. چنین تطبیقی نیازمند ادغام نزدیک بین بینایی ماشین، حسگرهای تماسی و کنترل حرکت جنبشی (kinematic control) است.
- بینایی end-to-end: تشخیص قطعات و جبران اختلافات هندسی و موقعیتی.
- حسگرهای نیرو (Force sensing): تضمین اتصالات محکم و ایمن بدون شکست مکانیکی.
- کنترل تطبیقی: واکنش دینامیک به شرایط واقعی بهجای پیروی از مسیرهای سخت و از پیش تعریفشده.
مقایسه Moz با دیگر آزمایشهای ربات انساننما
در سالهای اخیر گزارشهایی از دشواریهای متعدد رباتهای انساننما هنگام آزمایش در محیطهای کارخانهای منتشر شده است — از مفاصل بیش از حد گرمشونده تا شکست در مونتاژهای پیچیده. بسیاری از این سیستمها از طریق دموهای مرحلهای یا کنترلشده توجه رسانهای کسب میکنند، اما در محیطهای صنعتی پیوسته و نیازمند کار مداوم و سنگین ناکارآمد ظاهر میشوند. تفاوت اصلی در پایداری، خنکسازی مؤثر، کارایی توان مصرفی و توان نگهداری طولانیمدت است؛ چالشهایی که در محیطهای تولید واقعی تشدید میشوند.
CATL بر آمادگی صنعتی Moz بهعنوان یک وجه متمایز تأکید میکند. رویکرد شرکت به نظر میرسد بر مقاومسازی وظیفه-محور (task-specific robustness) متمرکز باشد تا نمایش عام-المنفعه. بهعبارت دیگر، بهجای هدفگذاری روی رباتی که بتواند هر کاری را انجام دهد، تمرکز بر تضمین زمان بالای کار مفید (uptime) و کیفیت تکرارشونده در وظایف مشخص قرار گرفته است. این استراتژی میتواند به معنای اولویتبندی قابلیت اطمینان، تعمیر و نگهداری پیشگیرانه و بهینهسازی چرخه عمر قطعات باشد که برای کاربردهای صنعتی حیاتی است.
چرا این موضوع برای صنایع رباتیک و خودروهای الکتریکی اهمیت دارد
بخش رباتهای انساننمای چین بهسرعت در حال رشد است و تحلیلگران درباره احتمال تولید بیشازحد ظرفیت مشابه رشد سریع تولید خودروهای الکتریکی هشدار دادهاند. با این حال، استقرار CATL نشان میدهد که رباتهای انساننما میتوانند بیش از نمونههای نمایشی آزمایشی باشند — آنها میتوانند ابزارهای عملیاتی باشند که به شاخصهای تولید کمک کنند و تغییرپذیری در عملیات حساس به کیفیت را کاهش دهند. بهویژه در صنایعی مانند تولید باتری و مونتاژ خودروهای برقی که خطاها میتواند هزینههای بالایی بههمراه داشته باشد، بهرهوری و یکنواختی کیفیت اهمیت فزایندهای دارد.
برای تولیدکنندگان، این سؤالهای عملی مطرح میشود: آیا پلتفرمهای انساننما بهصورت اقتصادی در وظایف مختلف مقیاسپذیر خواهند بود، و آیا توسعهدهندگان میتوانند دوام و زمان کار مفید (uptime) را بهطور مداوم بهبود بخشند؟ پاسخ این پرسشها مستلزم تحلیل هزینه-فایده طول دوره (total cost of ownership)، هزینه نگهداری، نیاز به نیروی انسانی متخصص برای نظارت و برنامهریزی لجستیکی برای ادغام رباتها در خطوط تولید موجود است. علاوه بر این، توسعه نرمافزار مدیریت ناوگان رباتها (robot fleet management) و سیستمهای نظارت لحظهای برای اطمینان از عملکرد هماهنگ میان انسان و ربات ضروری است.
برای سرمایهگذاران و برنامهریزان کارخانه، نمونه CATL مسیر روشنی را نشان میدهد که در آن سرمایهگذاری در رباتیک مستقیماً به عملکرد کارخانه و درآمد گره میخورد. هنگامی که یک ربات انساننما میتواند نرخ نقص را کاهش دهد، زمان چرخه را ثابت نگه دارد و نیاز به دخالت انسانی در مراحل بحرانی را کم کند، ارزش مالی ملموسی ایجاد میشود. در عین حال، این انتقال نیازمند استانداردهای جدید ایمنی، گواهینامههای صنعتی و چارچوبهای تضمین کیفیت است که استفاده از رباتهای انساننما را در محیطهای صنعتی تسهیل کند.
تصور کنید کارخانهای در آینده که در آن رباتهای انساننما پیچیدهترین مراحل مونتاژ را انجام میدهند در حالی که با انسانها در بازرسی و نظارت همکاری میکنند. Moz شرکت CATL همه سوالها را پاسخ نمیدهد، اما گامی ملموس به سوی آن سناریو است — و سیگنال اولیهای است از اینکه اتوماسیون انساننما در حال انتقال از نمایشهای نمایشی به کف کارخانه است. این روند میتواند منجر به بازتعریف نقش نیروی انسانی در خطوط تولید شود؛ از انجام کارهای تکراری و پرخطر به نظارت، نگهداری و مدیریت فرآیندهای پیچیده تغییر کند.
علاوه بر مزایای کیفی، استقرار موفق Moz اطلاعات فنی ارزشمندی برای بهبود الگوریتمهای بینایی ماشین، یادگیری تقویتی برای اصلاح حرکات دست و بازو، و طراحی مکانیکی مفاصل دارد. دادههای تولیدی واقعی که از عملکرد روزانه ربات در شرایط صنعتی جمعآوری میشوند، میتوانند به آموزش مدلهای بیشتر قابل اعتماد برای تشخیص خطا، پیشبینی خرابی قطعات مکانیکی و بهینهسازی مسیر حرکت کمک کنند. این چرخه بازخورد (feedback loop) بین بهرهبرداری صنعتی و توسعه تحقیقاتی، شتاب نوآوری را افزایش میدهد.
در حوزه باتریسازی خودروهای برقی، دقت اتصال و یکپارچگی الکتریکی از اهمیت ویژهای برخوردار است، زیرا نقص در اتصالات میتواند منجر به عملکرد ضعیف باتری، افزایش مقاومت داخلی یا حتی خطرات ایمنی شود. بنابراین، استفاده از رباتی که میتواند ثابت و با دقت بالا کانکتورها را وارد کند به کاهش ضایعات، افزایش بازده تولید و تضمین طول عمر باتری کمک شایانی میکند. این مزایا در کنار کاهش هزینههای نیروی کار مستقیم، استهلاک انسانی و افزایش ثبات کیفی، ارزش تجاری محسوسی را برای تولیدکنندگان فراهم میآورد.
از منظر فنی، ترکیب بینایی end-to-end با حسگر نیرو و کنترل تطبیقی که در Moz مشاهده میشود، یک معماری مؤثر برای وظایف مونتاژی دقیق ارائه میدهد. بینایی end-to-end میتواند شامل شبکههای عصبی عمیق برای تشخیص قطعات و تخمین وضعیت سهبعدی آنها (pose estimation) باشد؛ حسگرهای نیرو/گشتاور (force/torque sensors) اطلاعات لازم برای تشخیص تماس و تنظیم فشار را فراهم میکنند؛ و کنترل تطبیقی با الگوریتمهای رگولاتور (مانند PID تطبیقی یا کنترل مقاوم) و برنامهریزی مسیر دینامیک، به ربات این امکان را میدهد که بر تغییرات ناخواسته محیط غلبه کند. چنین یکپارچگیای نیازمند هماهنگی بیشتر بین تیمهای سختافزاری، نرمافزاری و عملیات است.
مسائل پیرامون نگهداری و تعمیرات نیز اهمیت دارند: برای دستیابی به زمان کار مفید بالا، برنامههای نگهداری پیشبینانه مبتنی بر تحلیل دادهها باید طراحی شوند تا از خرابیهای ناگهانی جلوگیری شود. قطعاتی مانند موتورها، گیربکسها، حسگرها و کابلها باید تحت نظارت دقیق باشند و چرخههای تعویض قطعات و بازسازی مکانیکی تنظیم شوند. افزون بر این، سازندگان باید برای آموزش کارکنان خط تولید در کار با رباتها، تنظیم پارامترها و واکنش به خطاهای احتمالی سرمایهگذاری کنند.
در نهایت، موارد مرتبط با استانداردهای ایمنی، انطباق با مقررات محلی و نگرانیهای اخلاقی و اجتماعی در رابطه با جایگزینی نیروی کار نیز باید مورد توجه قرار گیرند. ادغام رباتهای انساننما در خطوط تولید بزرگ مستلزم چارچوبهای قانونی و استانداردهای فنی جدید است تا هم ایمنی کارکنان انسانی و هم امنیت عملکرد رباتها تضمین شود.
به طور خلاصه، استقرار Moz در خط تولید باتری شرکت CATL نشاندهنده حرکت جدی به سمت کاربردهای عملی رباتهای انساننما در صنایع پرتقاضا مانند تولید باتری و خودروهای الکتریکی است. این اقدام میتواند فصل جدیدی در توسعه اتوماسیون صنعتی باز کند که در آن رباتهای تطبیقی و هوشمند نقش مهمی در تضمین کیفیت، کاهش تغییرپذیری و افزایش بهرهوری ایفا میکنند.
منبع: gizmochina
نظرات
مکس_ایکس
اگر واقعاً بتونه خطاها رو کم کنه، ارزش مالی داره. اما سوال: وقتی یکی از موتورها خراب شد، خط تولید چطور ادامه پیدا میکنه؟
رضا
معقول به نظر میاد، ولی جای شک هست؛ مخصوصا هزینههای پنهان و نیاز به نیروی متخصص برای نگهداری و مانیتورینگ
سیتیلاین
حس میکنم تا وقتی TCO و نگهداری روشن نشه، هایپ زیاده... ولی قبول دارم کاربردی شدنش مسیر درستیِ، البته نه بی قید و شرط
لابکور
تحلیل فنی معقول؛ بینایی end-to-end با حسگر نیرو ترکیب منطقیه. سوال اینه که استانداردهای ایمنی و نگهداری چطور لحاظ شده اند
توربو
من تو یه خط تولید دیدم حتی بازوهای صنعتی هم بدجور گرم میشن، پس اگه Moz بدون اذیت کار کنه، تحسین داره. اما آموزش اپراتورها رو فراموش نکنید!
کوینپایل
آیا واقعاً 99٪ پایدار میمونه یا آمار تو شرایط آزمایشیه؟ هزینه نگهداری و زمان کار مفید رو باید دید، وگرنه فقط نمره تبلیغاتی میده
دیتاپالس
وای، این جدیه؟ رباتی که کانکتورها رو با 99٪ میزنه، فکرشو نمیکردم! خیلی کنجکاوم ببینم توی فشار کاری طولانی چه تغییری میکنه
ارسال نظر