10 دقیقه
ماجول همچنان به پیش رفت. بهنوعی تنها. در دو روز از دسامبر ۲۰۲۵، کاوشگر ناسا، پرسِویرنس، با استفاده از نقاط مسیر (waypoints) تولیدشده توسط هوش مصنوعی، بدون کنترل مستقیم انسان بر فرمان، مسافت ۴۵۶ متر را در سطح مریخ پیمود. آن مسافت — تقریباً یک و نیم زمین فوتبال — برای یک خودرو اندک است، اما برای دستگاهی که از میان دهها میلیون کیلومتر فضای خالی ارتباط برقرار میکند و با تأخیرهای ارتباطی ۱۲ تا ۲۵ دقیقهای روبهروست، اهمیت زیادی دارد.
چه اتفاقی روی مریخ افتاد
این آزمایش، دو نوع خودمختاری را ترکیب کرد. تیمهای زمینی از سامانهای مبتنی بر هوش مصنوعی استفاده کردند که برای تحلیل تصاویر مداری با وضوح بالا و مدلهای ارتفاعی دیجیتال آموزش دیده بود؛ آن را مأمور شناسایی خطرات و پیشنهاد مسیر کردند. زنجیره حاصل از نقاط مسیر به پرسِویرنس ارسال شد و نرمافزار ناوبری خودکار کاوشگر وظیفه هدایت را برعهده گرفت، در حالی که تصاویر جدیدی میگرفت و بهصورت لحظهای تنظیمات لازم را انجام میداد.
این نخستین بار نیست که یک مریخگرد بهطور خودکار رانده شده است؛ پرسِویرنس پیشتر نیز از ناوبری خودکار بهصورت معمولی بهره میبرد. آنچه در اینجا تغییر کرد، گام برنامهریزی تولیدشده توسط هوش مصنوعی بود. بهجای آنکه اپراتورهای انسانی روی زمین اهداف میانی را با فواصل حدوداً ۱۰۰ متر علامتگذاری کنند، هوش مصنوعی عکسهای مداری HiRISE و دادههای ارتفاعی را ارزیابی کرد تا مسیر پیوستهای را ترسیم کند که خطرها را دور بزند و پرسِویرنس بتواند در بازههای طولانیتری آن را دنبال کند. این روش، تلفیقی از تحلیل تصاویر ماهوارهای، مدلسازی توپوگرافی و قضاوت مهندسی است که با هدف افزایش ایمنی و کارایی پیمایش طراحی شده است.
چگونه تیم ریسک را کاهش داد
هر آزمایش خارج از زمین با احتیاط آغاز میشود. پیش از اینکه هر مسیر تولیدشده توسط هوش مصنوعی به مریخ ارسال شود، مهندسان آن را روی نمونه زمینی کاوشگر اجرا کردند: "Vehicle System Test Bed" یا VSTB در آزمایشگاه JPL و در محیط شبیهسازیشده Mars Yard. VSTB نمونهٔ مهندسیای است که برای بازتولید مشکلات، اعتبارسنجی نرمافزار و تمرین روشهای نو در محیطی کنترلشده استفاده میشود. JPL نمونههای دوقلویی مشابهی را برای مأموریتهای دیگر از جمله کنجکاوی (Curiosity) ساخته است تا آزمونها واقعگرایانه و قابل اعتماد باشند.
این مرحله سختافزار-در-حلقه اطمینان خاطر به اپراتورها داد. هوش مصنوعی پیشتر خطرات آشکار را فیلتر کرده بود — دامهای شنی، میادین سنگی، سنگبستر نمایان و برآمدگیهای سنگی — و نقاط مسیری را علامت زد که بین این موانع قرار میگرفتند. پس از اینکه آن نقاط مسیر در آزمایش زمینی پذیرفته شدند، پرسِویرنس در مریخ کنترل را برعهده گرفت و در طول دو روز رانندگیِ خودکار، ۴۵۶ متر (۱٬۴۹۶ فوت) را بدون تِلِئوپِراسیون انسانی طی کرد. این روند شامل آزمونهای متعدد شبیهسازی، بررسی معیارهای ایمنی و بازبینی زنجیره تصمیمگیری هوش مصنوعی بود تا احتمال خطا به حداقل برسد.
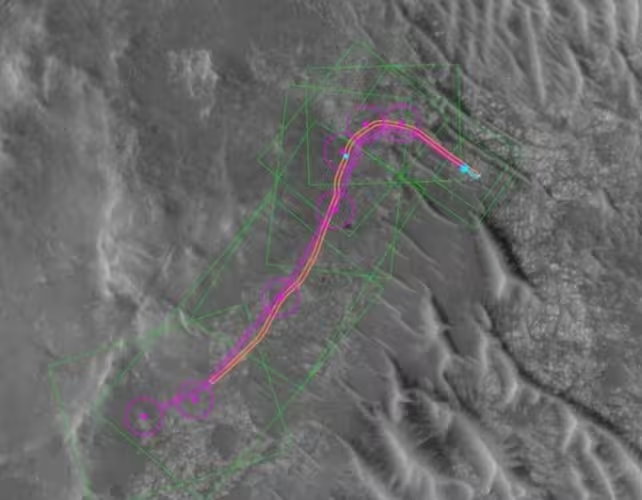
این تصویر مداری حاشیهنویسیشده مسیر پرسِویرنس را در روز دوم رانندگی خودران، در ۱۰ دسامبر ۲۰۲۵، نشان میدهد. خط ارغوانی مسیر برنامهریزیشده توسط هوش مصنوعی را نشان میدهد و خط نارنجی مسیر واقعی را نمایش میدهد.
چرا این موضوع اهمیت دارد
مسافت تنها بخشی از داستان است. پیشرفت اصلی مربوط به مقیاسبندی اکتشاف است؛ در حالی که با تأخیرهای زمانی و ظرفیت محدود اپراتورها مقابله میکنیم. سیگنالها بین زمین و مریخ تا چند دقیقه زمان میبرند. این تأخیر، تیمهای مأموریت را مجبور میکند که رانندگیها را از پیش برنامهریزی کنند و سپس به کاوشگر اعتماد کنند تا دستورالعملها را دنبال کند. هرچه آن رانندگیها طولانیتر و پیچیدهتر شوند، عدم قطعیت کاوشگر درباره موقعیت دقیق خود بیشتر میشود — مشکلی که مهندسان آن را "رانش موقعیتیابی" یا localization drift مینامند.
برای ارتقاء رانندگیها از مقیاس صدها متر به کیلومترها، کاوشگر باید خود را با فواصل کوتاهتری دوباره موقعیتیابی کند، به این معنی که تصاویر سطحی را با نقشههای مداری مطابقت دهد و برآوردهای موقعیت را تنظیم کند. امروزه بخش گستردهای از این تطابق توسط انسانها انجام میشود. هوش مصنوعی وعده میدهد که این فرایند را با یادگیری برای جفتسازی سریعتر و با استحکامترِ عکسهای زمینی و چشماندازهای مداری تسریع کند، بار کاری اپراتورها را کاهش دهد و اجازه دهد که مسیرهای طولانیتر و ایمنتری اجرا شوند. بهویژه در مأموریتهای طولانیمدت، کاهش نیاز به آپلینکهای مکرر میتواند موجب صرفهجویی در زمان، هزینه و فرصتسنجی علمی شود.
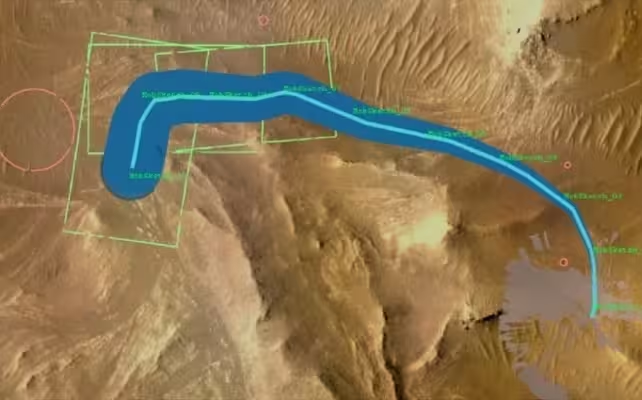
نواحی آبی در این تصویر نشان میدهد که عدم قطعیت کاوشگر درباره موقعیتش روی سطح چطور هرچه بیشتر دستورالعملها را دنبال میکند، افزایش مییابد.
زمینهٔ علمی و مهندسی
ناوبری خودمختار بر روی سه رکن استوار است: ادراک (دیدن خطرات و ویژگیهای مفید)، موقعیتیابی (دانستن محل دقیق کاوشگر) و برنامهریزی و کنترل (انتخاب و دنبالکردن مسیر ایمن). هوش مصنوعی مولد عمدتاً در کمک به ادراک و برنامهریزی نقش دارد؛ با دریافت و تفسیر سریع موزائیکهای بزرگ تصاویر مداری و سپس پیشنهاد مسیرهایی که خطر را دور میزند و زمینهایی را که از نظر علمی جذابترند ترجیح میدهد.
لایهٔ خودمختاری درونسفینهٔ پرسِویرنس سپس یک لایهٔ دوم را اضافه میکند: تصویربرداری در حین حرکت و اتخاذ تصمیمات دقیق برای اجتناب از موانع فوری در مقیاس متر یا کمتر. ترکیب هوشِ زمینی و درونسفینه حلقهای ایجاد میکند که میتواند به مأموریتهای آینده اجازه دهد توالیهای رانندگی طولانیتری را با تعداد آپلینکهای کمتر آزمایش کنند و از طرفی ایمنی را حفظ کنند.
مهم است بدانیم که این نمایش از یک مدل هوش مصنوعی مشتقشده از مدل Claude شرکت Anthropic استفاده کرده، و این مدل در یک جریان کاری مهندسی سختگیرانه یکپارچه شده است. ناسا تأکید ویژهای بر اعتبارسنجی دارد: هر مسیر پیشنهادی ابتدا در مقابل نمونهٔ Mars Yard بررسی شد و سپس در شبیهسازیها آزموده شد پیش از آنکه فرمانها از طریق فضای بینسیارهای ارسال شوند. این یک پیشرفت سنجیده و مرحلهای است — نه یک جهش بیمحابا.
از منظر فنی، تطبیق تصاویر مداری HiRISE با عکسهای سطحی نیازمند حل مسائل هندسی (مانند تفاوت مقیاس و دید) و منطق مکانی پیچیده است. الگوریتمهای تطبیق تصویر، مدلهای ارتفاعی دیجیتال (DEM)، و شبکههای عصبی کانولوشنی (CNN) یا مدلهای بیناییبنیاد (vision foundation models) معمولاً برای استخراج ویژگیها و تعیین نواحی احتمال خطر بهکار میروند. در نهایت، لایهٔ برنامهریز مسیر باید محدودیتهای دینامیکی کاوشگر، مصرف انرژی، اهداف علمی و سیاستهای ایمنی مأموریت را متوازن کند.
به کجا خواهد انجامید
انتظار میرود نقش هوش مصنوعی در مأموریتهای آینده پررنگتر شود. مفاهیمی از پیش موجودند برای مریخگردهایی که میتوانند گروههایی از پهپادها (drone swarms) را مستقر کنند تا مناطق خارج از دید مستقیم را بررسی کنند، با سامانههای درونسفینه که چندین وسیله را هماهنگ میکنند. مأموریت Dragonfly ناسا به قمر تیتان، که یک روتورکرافت است و مأموریت نمونهبرداری از سطح پیچیده این قمر را بر عهده دارد، برنامه دارد از ناوبری خودمختار و مدیریت داده درونسفینه برای مدیریت مشاهدات در پروازها بین نقاط علمی استفاده کند.
مهندسان ناسا آیندهای را میبینند که در آن محاسبات لبه (edge computing) و مدلهای هوش مصنوعی گزینششده حکمِ داوری جمعی تیمهای مأموریت را به میدان میبرند: سامانههای هوشمندی که اهداف را اولویتبندی میکنند، سنگهای غیرمعمول را برای دانشمندان روی زمین علامتگذاری میکنند و پیمایشهای چندروزه را بههم میدوزند در حالی که سطح ریسک را پایین نگه میدارند. این بازده هم بیشتر سطح پوشش دادهشده و هم افزایش دانش علمی به ازای هر دلار هزینه مأموریت خواهد بود.
بهعلاوه، توسعهٔ مدلهای هوش مصنوعی سفارشیشده برای مأموریت، همراه با بهکارگیری چارچوبهای تأیید و اعتبارسنجی، امکان انتقال تدریجی و ایمنِ تصمیمگیری را فراهم میآورد — یعنی انتقال قابلیتهای کلیدی از تیمهای زمینی به سامانههای محاسباتی در لبهٔ شبکهٔ مأموریت. این فرایند شامل طراحی معیارهای قابلسنجش برای ریسک، بلوکهای نرمافزاری مقاوم در برابر خطا و سیاستهای بازگشت امن (safe-fail) میشود.
دیدگاه کارشناسان
«این نوع نمایش، گام منطقی بعدی است،» دکتر النا مارکونی، مهندس رباتیک سیارهای با دههها تجربه میدانی میگوید. «ما به ماشینها آموختهایم که در مقیاسهای مختلف ببینند — از مدار تا دوربینهای روی مریخگرد — و اکنون به آنها میآموزیم که طوری برنامهریزی کنند که شبیه احتیاط انسانی باشد اما با سرعتِ ماشین عمل کند. نتیجه ضریبتعدیل برای اکتشاف است: رانندگیهای هوشمندتر و درازمدتتر که دانشمندان را آزاد میکند تا روی کشفیاتِ چالشبرانگیزتر تمرکز کنند.»
واندی ورما، رباتیکدان فضایی در JPL و از اعضای تیم پرسِویرنس، یادآور شده است که هوش مصنوعی مولد در سادهسازی ادراک، موقعیتیابی و برنامهریزی برای رانندگی خارج از سیاره نویدبخش است. مدیران اکتشاف ناسا این تلاش را بهعنوان ساخت پایهٔ فناورانه برای حضور پایدار انسانی و رباتیک فراتر از زمین چارچوببندی میکنند. همانطور که مت والِیس، مدیر دفتر سامانههای اکتشافی JPL، پیشنهاد کرده است، روشنسازی مسیرمان به ماه و مریخ مستلزم سامانههای هوشمندی است که هم در زمین و هم در لبهٔ شبکه عمل میکنند.
رانندگی خودکار دو روزه ۴۵۶ متری پرسِویرنس نه خط پایان است و نه ترفندی تبلیغاتی. این یک پیشرفت سنجیده در توانمندی است که در برابر نمونههای مهندسی و رویههای محافظهکارانه اعتبارسنجی شده است. این آزمایش نشان میدهد که نه تنها هوش مصنوعی میتواند مسیرهای عملی از دادههای مداری پیشنهاد دهد، بلکه ادغامِ بهخوبی آزمودهشدهٔ خودمختاری زمینی و درونسفینه میتواند بهطور ایمن فاصلهٔ بین آپلینکها را افزایش دهد و در عین حال ویژگیهای علمی جذاب را برای مطالعهٔ دقیقتر علامتگذاری کند.
هر متر در سیارهای دیگر اهمیت دارد. با هر کیلومتر خودران موفق، کاوشگران رباتیک ما زمان بیشتری برای فکر کردن، برنامهریزی و کشف میخرند — کشفیاتی که مسیر مأموریتهای آینده را شکل خواهند داد و در نهایت به انسانهایی که به دنبال آنها به منظومهٔ شمسی میروند کمک خواهند کرد.
منبع: sciencealert
نظرات
پرهام_
اگه این به کیلومترها برسه، ماموریتها عوض میشه. سریع عمل کنن ولی احتیاط لازم است
مهدی
خوبه ولی یه ذره اغراق داره. آیا سیستم در برابر خطاهای غیرمنتظره مقاوم هست؟
تریپمایند
پیشرفت منطقیه، اما اینکه از مدل Claude استفاده شده یه نکته است. مدل سفارشی بهتر نبود؟
بیوانیکس
تو کار کنترل رباتیک یه چیز شبیه دیدم؛ VSTB واقعا مهمه، زمانبر ولی لازم، تجربهای که باید باشه
توربوام
این دادهها رو چطوری اعتبارسنجی کردن؟ شبیهسازی خوبه ولی باز ریسک هست...
بلاکتون
معقول به نظر میاد اما باید دید تو شرایط واقعی چی میشه، شبیهسازی معمولا راستقورت نمیده
دیتاپالس
وای، ۴۵۶ متر تو دو روز؟ یعنی واقعاً داریم وارد مرحلهٔ جدیدی از کاوش میشیم... هیجان زدهم
ارسال نظر