
7 دقیقه
بوئیک الکترا L7 در آزمون مستقل رانندگی خودران چین صدرنشین شد — تسلا عقب مانده
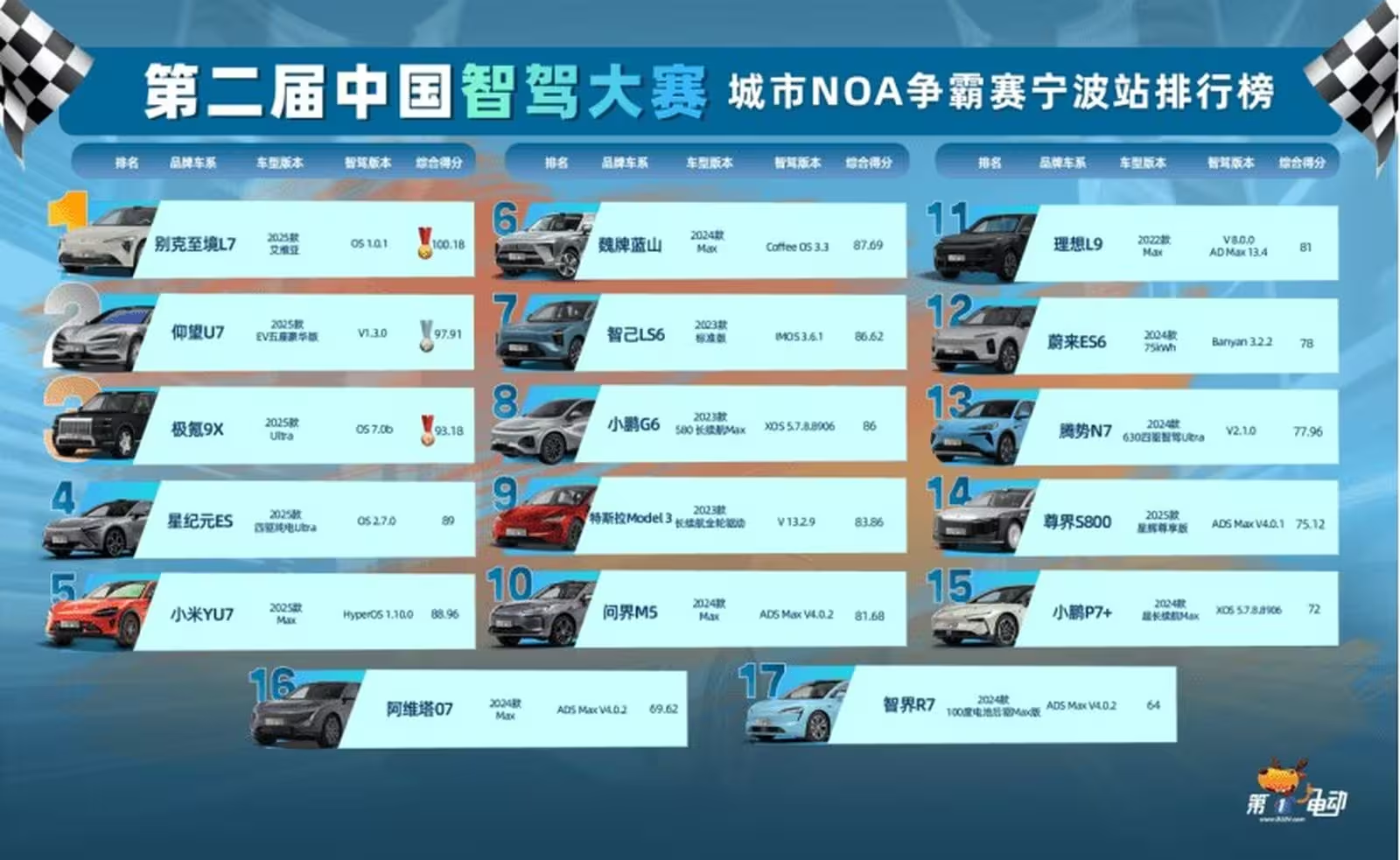
تنها چند روز پس از آنکه تسلا به سرمایهگذاران خود اعلام کرد که دستیابی به رانندگی کاملاً خودران در دسترس است، یک رقابت مستقل رانندگی خودران در چین پیام متفاوتی را مخابره کرد. این رقابت که توسط D1EV در نینگو، استان ژجیانگ سازماندهی شد و با عنوان دومین مسابقه هوشمندسازی کمکراننده چین برگزار گردید، بوئیک Electra L7 محصول SAIC-GM را در صدر میان 17 خودروی شرکتکننده قرار داد؛ در حالی که تسلا مدل 3 با نتیجهای ناامیدکننده در مقام نهم ایستاد.
مسیر شهری و بینشهری 29 کیلومتری — که شامل 28 چراغ راهنمایی، پنج نقطه میانی (waypoint) و هشت سایت آزمایشی چالشبرانگیز بود — بهصورت محرمانه نگهداری شد تا تیمها نتوانند سیستمهای خود را متناسب با سناریوهای مشخص از پیش تنظیم کنند. این محرمانگی باعث شد نقاط قوت و ضعف واقعی در عملکرد مجموعهای گسترده از سیستمهای پیشرفته کمکراننده (ADAS) و پشتههای رانندگی خودران آشکار شود و تصویری عینیتر از آمادهسازی فناوریها در شرایط دنیای واقعی ارائه دهد.
نتایج کلیدی
- 1st: Buick Electra L7 (SAIC-GM) — 100.18 points
- 2nd: BYD YangWang U7 — 97.91 points
- 3rd: Geely Zeekr 9X — 93.18 points
- 5th: Xiaomi YU7 — 88.96 points
- 9th: Tesla Model 3 — 83.86 points

این نتایج روند بزرگتری را نشان میدهد: در بازار چین، بسیاری از خودروسازان و شرکتهای تکنولوژی با سرعت قابلتوجهی قابلیتهای ADAS و خودران را توسعه دادهاند، اغلب با اتکا به LiDAR و فیوژن چندحسی همراه با نقشهبرداری با دقت بالا و مدلهای بزرگ هوش مصنوعی. چنین ترکیبی از حسگرها و مدلهای پردازشی در شرایط پیچیده شهری و روستایی برتری عملکردی قابلتوجهی ایجاد کرده است.
چرا Electra L7 برنده شد
Electra L7 یک خودروی الکتریکی با برد توسعهیافته (EREV) از SAIC-GM است که ترکیبی از پیشرانه کارا و یک پشته خودران مقاوم را ارائه میدهد. نکته اساسی این است که این خودرو نخستین شرکتکننده در رقابت بود که از پلتفرم بزرگ مدل رانندگی خودکار Momenta R6 Flywheel Big Model AD برای سیستم Navigate on Autopilot (NOA) خود استفاده میکرد. مدلهای گسترده ادراکی و برنامهریزی Momenta بر فیوژن چندسنسوری — بهویژه LiDAR — تأکید دارند و به نظر میرسد همین رویکرد چندمنظوره در طول مسیر تعیینکننده بوده است.

چندین بخش آزمایشی این برتری را برجسته کردند. صفحه شفاف پلاستیکی ساختدستی که برای شبیهسازی موانع با دید کم نصب شده بود، تنها توسط شش خودرو شناسایی شد: Li Auto L9، YangWang U7، Nio ES6، Buick Electra L7، Zeekr 9X و Xiaomi YU7 — همه این خودروها مجهز به LiDAR بودند. سامانههای مبتنی بر دیدِ صرف، از جمله FSD/Intelligent Assisted Driving تسلا، آن مانع را به طور کامل از دست دادند؛ که نشان میدهد در شرایط خاصِ مانعهای کمکنتراست یا شفاف، حسگرهای فعال مانند LiDAR و الگوریتمهای فیوژن دادهها برتری دارند.
توضیح فنی بیشتر: مدلهای بزرگ ادراکی مثل آنچه Momenta ارائه میدهد، معمولاً از همگرایی دادههای LiDAR، دوربین، رادار و HD map بهره میبرند تا بازنمایی سهبعدی دقیقتری از محیط بسازند. ترکیب دادههای نقطهای (point cloud) با فریمهای تصویری و اطلاعات مکانی نقشههای دقیق، باعث میشود استنباط عمقی از موانعِ شفاف، لبهها و سطوح کمانعکاس بهتر انجام شود و برنامهریزی مسیر و تصمیمگیری لحظهای (trajectory planning و behavior planning) پایدارتر گردد.
چالشهای مسیر و رفتار سامانهها
مسیر مسابقه ترکیبی از کوچههای تنگ مسکونی، میدانهای دوربرگردان، مسیرهای U شکل با دید کم، جادههای روستایی و موانع مصنوعی را دربر میگرفت تا قابلیتهای ناوبری، انتخاب لاین، تشخیص موانع و تصمیمگیری را ارزیابی کند. نکات برجسته شامل موارد زیر است:
- جادههای باریک: طراحیشده برای آزمون دقت موقعیتیابی و اجتناب؛ سه خودرو درخواست کنترل دستی کردند (Wey 07، Xiaomi YU7، Xpeng G6).
- دوربرگردانها: همه شرکتکنندگان توانستند آنها را با موفقیت طی کنند که نشاندهنده بهبود منطق انتخاب لاین در بازار است.
- دورزدن با دید پنهان (Blind-spot U-turns): چندین خودرو را دچار مشکل کرد؛ Nio ES6 و Xpeng G6 نیاز به دخالت راننده داشتند در حالی که Denza N7 از مسیر ناوبری منحرف شد.
- مانع شفاف ساخت بشر: تنها خودروهای مجهز به LiDAR آن را بهطور قابلاعتماد تشخیص دادند.
- مسیر U شکل گیجکننده: چندین مدل وارد جادههای نادرست شدند یا نیاز به مداخله داشتند که ضعفهایی را در استدلال مسیریابی در برابر تابلوها و نشانههای مبهم نشان داد.

دو سناریوی اضافی — یک تقاطع پیچ به راست همراه با یک دوربرگردان و یک جاده روستایی با ترافیک سبک — رقابتیتر بودن شرکتکنندگان را آشکارتر کرد. تسلا مدل 3 توانست آزمون پیچ به راست را با موفقیت تمام کند، اما همچنان در سراسر کل مسیر از قوام لازم برخوردار نبود که این نداشتن ثبات منجر به قرارگیری آن در میانه جدول شد.
از منظر رفتار سیستمها، برخی خودروها در ارزیابی همزمان چندین عامل محیطی (مثل فاصله با خودروهای پارکشده، عابرین پیاده مخفی پشت موانع، و تابلوهای مبهم) دچار تأخیر در تصمیمگیری شدند؛ در حالی که پشتههایی که از محاسبات لحظهای سریع، نگاشت دقیق و قوانین تصمیمگیری مبتنی بر مدلهای بزرگ استفاده میکردند، رفتارهای روانتر و کمخطاتری را نشان دادند.
این نتیجه برای تسلا و بازار کلی رانندگی خودران چه معنی دارد
تسلا بهصورت برجستهای روی هوش مصنوعی، رباتاکسیها و دستیابی به خودرانی کامل تمرکز کرده است و ایلان ماسک وعده رانندگی بدون نظارت را تا پایان 2025 داده است. در آمریکای شمالی روایت اغلب حول محور رقابت تسلا و Waymo میچرخد؛ Waymo در مناطق محدودی سرویسهای بدون راننده اجرا میکند. اما بازار چین صحنهای پرتراکم و سریعالحرکت است: خودروسازان محلی و شرکتهای فناوری در حال ادغام LiDAR، نقشهبرداری با دقت بالا و رویکردهای مدلهای بزرگ AI برای مقاومسازی قابلیتهای AD در ترکیبهای پیچیده شهری و روستایی هستند.
این رقابت دو نکته کلیدی را مطرح میکند:
- انتخاب حسگر اهمیت دارد. سامانههای مجهز به LiDAR در تشخیص موانع و درک سناریوها برتری واضحی نشان دادند، بهویژه برای مخاطرات شفاف یا کمکنتراست که برای دوربینهای صرف دشوار است.
- وعدههای end-to-end جایگزین عملکرد ثابت و اثباتشده در سناریوهای واقعی نمیشوند. یک نمایش موفق یا ادعای سرمایهگذار نمیتواند جایگزین آزمونهای میدانی مکرر و متنوع در جادههای عمومی و محیطهای رقابتی شود.
زمینه بازار و محصول
پیروزی Electra L7 اعتبار SAIC-GM را در بازاری که مصرفکنندگان و ناظران نظارتی بیش از پیش بر ایمنی ADAS و تأیید عملکرد در دنیای واقعی تمرکز دارند، تقویت میکند. برای تسلا، این نتیجه یادآور این است که رویکردهای مبتنی بر دیدِ صرف همچنان در برخی موارد محدودیتهایی دارند — بهویژه زمانی که ادراک مبتنی بر مدلهای بزرگ و فیوژن تقویتشده با LiDAR وارد بازی میشود.
نقلقول از یک ناظر مسابقه: ««Electra L7 در سناریوهای متنوع تصمیمگیریای سازگار نشان داد. این همان چیزی است که در انتخاب خودروهای مجهز به AD برای مشتریان و اپراتورهای ناوگان اهمیت خواهد داشت.»»
از منظر محصول، ترکیب سختافزار (LiDAR، رادار، دوربین و واحدهای پردازشی قوی) با نرمافزار (مدلهای بزرگ ادراکی، نقشههای HD، و الگوریتمهای برنامهریزی رفتار و مسیر) اکنون یک پشته مرسوم برای دستیابی به عملکرد قابل تکرار و ایمن است. این ترکیب برای کسب اعتماد مشتریان، تطبیق با مقررات ایمنی و کاهش نیاز به مداخله انسانی اهمیت دارد.
نگاهی به آینده
انتظار میرود دورهای بیشتری از آزمونها و نمایشهای عمومی برگزار شود، در حالی که خودروسازان ویژگیهای NOA و ADAS خود را پالایش میکنند. حرکت رو به جلو در چین احتمالاً باعث تقویت شراکتها بین تولیدکنندگان خودرو و شرکتهای هوش مصنوعی (مانند Momenta) خواهد شد و ممکن است موجب تسریع پذیرش LiDAR در مدلهای میان تا بالارده گردد.
برای رانندگان و خریداران ناوگان، درس ساده است: به عملکرد سیستمهای تأییدشده در شرایط واقعی توجه کنید نه به وعدهها. رقابتهایی مانند رویداد D1EV ارزشمند هستند چون سامانهها را در برابر سناریوهای پنهان و متنوع قرار میدهند — معیاری قویتر برای آمادگی نسبت به نمایشهای از پیش تعریفشده.
نکات برجسته
- رویداد: دومین مسابقه هوشمندسازی کمکراننده چین، نینگو
- مسیر: 29 کیلومتر، 28 چراغ راهنمایی، 5 نقطه میانی، 8 سایت آزمایشی
- فناوری برنده: Momenta R6 Flywheel Big Model AD بر روی Buick Electra L7
- تأثیر: ترکیب LiDAR و مدلهای بزرگ AI در حال حاضر در سناریوهای پیچیده از راهحلهای مبتنی بر دیدِ صرف پیشی میگیرد
همانطور که رقابت برای رانندگی خودران شدت میگیرد، برندگان کسانی خواهند بود که عملکردی ایمن و قابل تکرار را در جادههای واقعی و غیرقابلپیشبینی اثبات کنند. این آزمون نشان میدهد که تسلا هنوز در زمینهای مشخص کارهایی برای انجام دارد — دستکم در بستر بازار چین — در حالی که بازیگران سنتی و محلی با پشتههای حسگری جدید و شراکتهای هوش مصنوعی از مزیت رقابتی برخوردارند.












نظر بگذارید
نظرات (6)
نکتهی مهم: تسلا تبلیغاتش زیاده اما تو برخی تستها کم میاره، با این حال بعید نیست سریع آپدیت کنن و برگردن؛ رقابت خوبه، مصرفکننده سود میبره
مسابقه رئال یعنی همین، تبلیغات سرمایهگذار نیست که، ثبات تو سناریوهای واقعی مهمتره. ولی کاش جزئیات فنی بیشتر بود
من تو یه پروژه فیوژن کار کردم، دقیقا همین نتایج رو دیدم، نقشه HD و ادغام LiDAR تصویر رو کاملتر میکنه، البته هزینه و پیچیدگی هم هست
معقولیه، LiDAR فرق ایجاد میکنه مخصوصا با موانع شفاف. تسلا هنوز راه داره، ولی رقابت داغ شد، ببینیم بعدی چیه
این گزارش خوبه ولی یه سوال: معیار امتیازدهی دقیقا چی بوده؟ مسیر محرمانه جذابه اما شفافیت کم بود، شک دارم
وااای، انتظار نداشتم بوئیک صدر بشه! یعنی واقعا LiDAR + مدل بزرگ اینقدر تفاوت درست میکنه، تسلا باید جدی تر باشه...