8 دقیقه
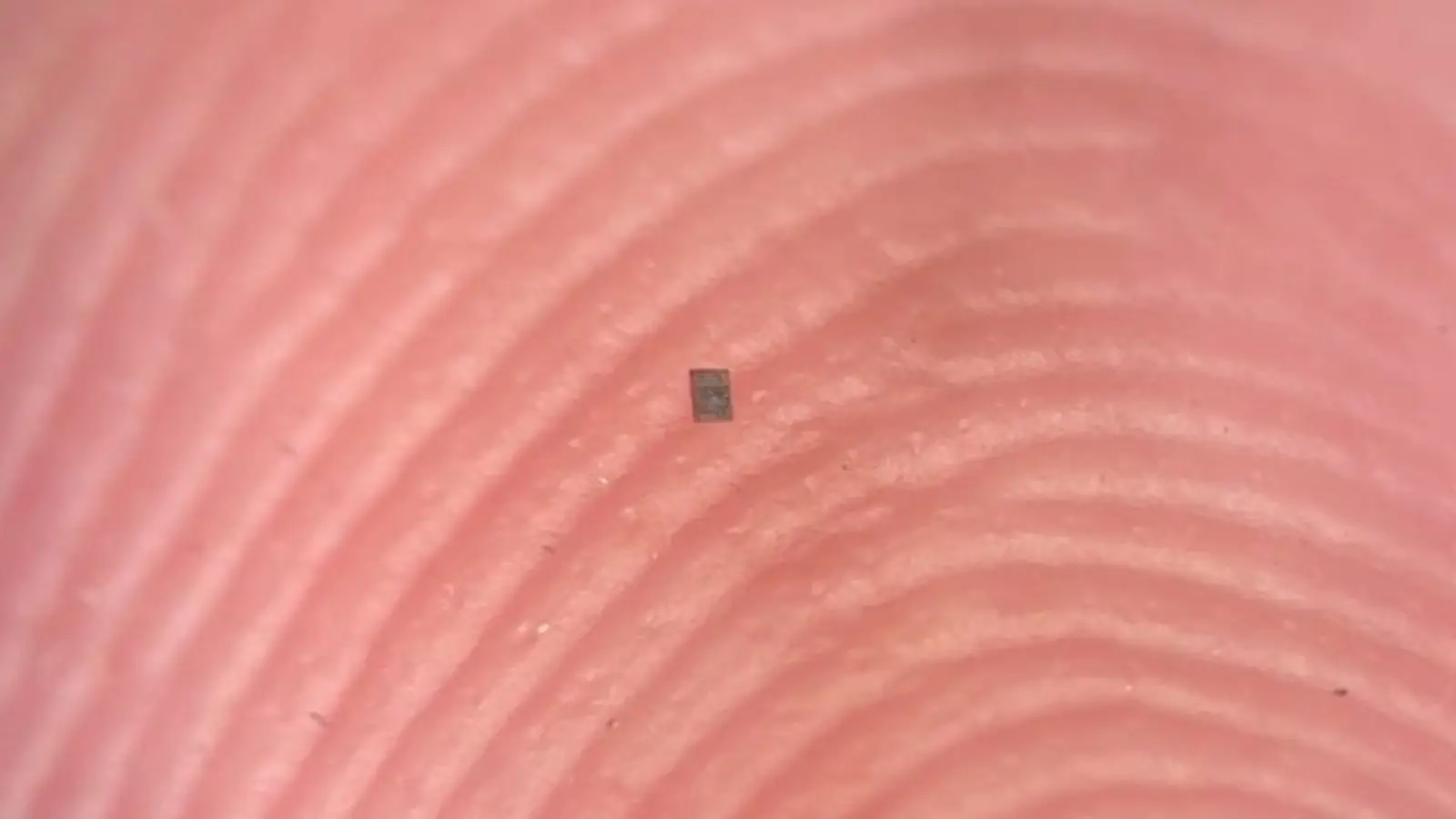
مهندسین دانشگاه پنسیلوانیا و دانشگاه میشیگان یک میکروبوت تقریباً نامرئی و کاملأ قابلبرنامهریزی ساختهاند که هنگام غوطهوری در سیال میتواند بهتنهایی حس کند، محاسبه کند و حرکت کند. دستگاهی به کوچکی یک دانه نمک — آنقدر کوچک که میتواند روی پستیبلندی اثر انگشت تراز شود — نشاندهنده کوچکسازی چشمگیر نسبت به پلتفرمهای رباتیک خودمختار پیشین است و افقهای تازهای برای رباتیک میکروسکوپی، حسگرهای توزیعشده و کاربردهای پزشکی و محیطی باز میکند.
چقدر «ریز» است و چرا این اندازه اهمیت دارد
میکروبوت جدید در حدود ۲۰۰ در ۳۰۰ میکرومتر عرض دارد و تنها ۵۰ میکرومتر ضخامت دارد. برای مقایسه: کوچکتر از یک لک روی پوست است و میتواند روی یک سکه بنشیند بدون اینکه تاریخ حکشده روی سکه را بپوشاند. اگر لحظهای چشم بردارید، ممکن است آن را گم کنید.
اهمیت اندازه در مقیاس میکرومتری از اینجا ناشی میشود که قوانین فیزیکی حاکم بر حرکت تغییر میکنند. نیروی گرانش و اینرسی که در مقیاس انسان غالب هستند، در این ابعاد چشمگیر نیستند؛ بهجای آن نیروهای ویسکوز و کشش سیال (drag) حکمفرما میشوند. مارک میسکین، مهندس نانورباتیک در دانشگاه پنسیلوانیا، توضیح میدهد: وقتی اندازه به حدی کوچک میشود، «فشار آوردن به آب مانند فشار آوردن به شیره است». غلبه بر این چالشهای سیالشناختی نیازمند بازاندیشی کامل در پیشرانش، کنترل و محاسبات بود.
در عمل، پارامترهای غیربعدی مانند عدد رینولدز (Reynolds number) و تأثیرات اندرکنش سطح-حجم، رفتار جریانهای لایهای و انتقال حرارت را تحت تأثیر قرار میدهند؛ بنابراین طراحی میکروبوت باید مبتنی بر مکانیک سیالات میکرو (microfluidics) و مواد سازگار با محیطهای مرطوب باشد. این مسایل مهندسی، نقش مهمی در انتخاب روشهای پیشرانش، انتخاب حسگرها و الگوریتمهای کنترلی ایفا کردند.
چه چیزهایی در رباتی به اندازه یک دانه نمک جا شده است
با وجود حجم بسیار کم، این پلتفرم شامل یک پردازنده، حافظه، حسگرها، گیرندهها و منبع تغذیه است. تیم سازنده هر میکروبوت را با سلولهای خورشیدی ریز تجهیز کرد که از نور LED حدود ۱۰۰ نانووات توان برداشت میکنند — مقداری که برای اجرای حسگری پایه، تصمیمگیری ساده و حرکت کافی است. ربات میتواند دمای سیال اطراف خود را اندازهگیری کند و آن اندازهگیریها را از طریق الگوهای حرکتی منتقل کند؛ رفتاری که با رقصهای هماهنگ زنبور عسل مقایسه شده است.
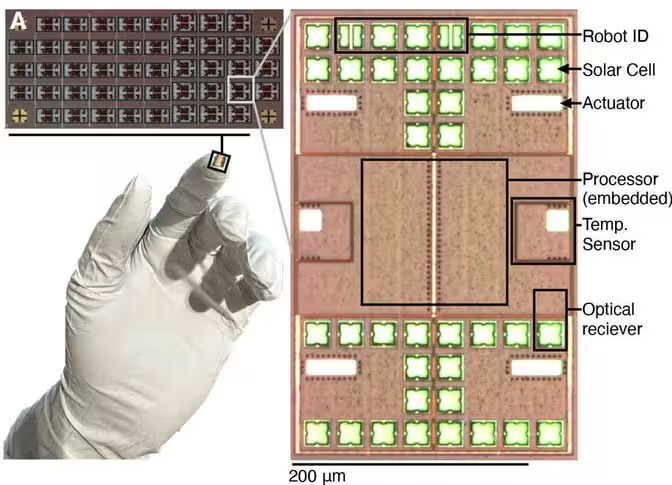
میکروبوتها تولیدشده در یک ورق (بالا چپ) تقریباً به اندازه نوک انگشت (پایین چپ). هر ربات حاوی سلولهای خورشیدی، گیرندههای اپتیکال، دو سنسور دما، یک پردازنده برای دریافت اطلاعات و تصمیمگیری، چهار پنل محرک که حرکت را ایجاد میکنند، و چهار گیرنده که به ربات اجازه شناسایی برنامههای ورودی را میدهد.
طراحی مدولار این سختافزار میکروالکترونیکی و میکروسیال، امکان تولید دستهای (batch fabrication) و بازآرایی اجزا را فراهم میکند؛ فرایندی که هزینههای تولید را پایین میآورد و سازگاری با تکنیکهای رایج در میکروفابریکیشن را افزایش میدهد. انتخاب مواد، لایههای گذرا و پوششهای سازگار زیستی (biocompatible coatings) برای کاربردهای آینده در محیطهای زنده یکی از محورهای توسعه تیم بوده است.
پیشرانش بدون اندامهای متحرک
حرکت سنتی — اندامها یا پاروهای ریز — در این مقیاس شکننده و عملیاتی ناپایدار میشود. بهجای آن، تیم پنسیلوانیا روش پیشرانشی با قطعات متحرک نمایان را کنار گذاشت و سیستمی طراحی کرد که هیچ عضو متحرک خارجی ندارد. میکروبوت با تولید میدان الکتریکی پیرامون بدنهاش جریانهای مولکولی در سیال اطراف را هدایت میکند. دستگاه عملاً میدان جریان محلی را تغییر میدهد: مثل این است که ربات هم در یک رودخانه شنا میکند و هم رودخانه را به جلو میرانَد.
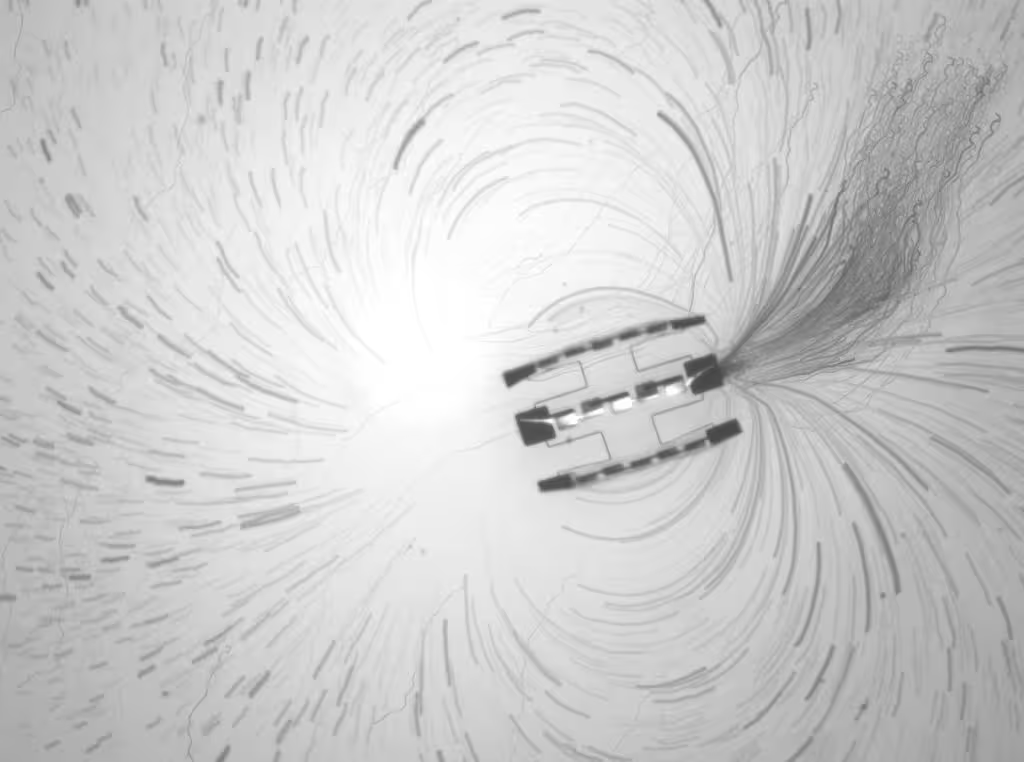
تصویر زمانفُراش پیشبینیشده از مسیر ذرات ردگیر نزدیک رباتی متشکل از سه موتور اتصال یافته به هم. (لوکاس هانسون و ویلیام رینهاردت / دانشگاه پنسیلوانیا)
تولید میدانهای الکتریکی موضعی از طریق الکترودهای ریز و پنلهای محرک، با بهکارگیری اثرات الکتروفورتیک و الکتروهیدرودینامیک در مقیاس میکرو، امکان ایجاد نیروی موثر برای غلبه بر نیروی ویسکوز را فراهم میکند. این روش پیشرانش مزایایی مانند مقاومت کمتر در برابر سایش مکانیکی، عمر طولانیتر و قابلیت عملکرد در محیطهای پیچیده دارد. با این حال، چالشهایی مانند کنترل دقیق بردارهای نیرو و تعامل بین رباتهای نزدیک به هم نیازمند مدلسازی عددی پیشرفته و آزمایشهای تجربی مکرر است.
محاسبات مینیاتوری: بازطراحی پردازندهها و کدنویسی
گنجاندن یک رایانه کارآمد در چنین بسته ریز نیازمند بازاندیشی کامل در نحوه طراحی مدارها و برنامهها بود. پژوهشگران دانشگاه میشیگان معماری میکروکامپیوتری توسعه دادند که از کمترین توان و حافظه استفاده میکند و متناسب با محدودیتهای سختافزار میکرورباتیک طراحی شده است. دیوید بلاو، دانشمند رایانهای که در پروژه نقش داشته، اشاره میکند که تیم هم سختافزار و هم نرمافزار را برای سازگاری با محدودیتهای انرژی و اندازه بازطراحی کردهاند.
از آنجا که حافظهی داخلی در حال حاضر محدود است، میکروبوت برنامههای ساده و محلی را اجرا میکند. اما این رفتارهای پایه برای حسگری خودمختار، تصمیمگیری محلی و حرکت کافی هستند. پلتفرم همچنین شامل گیرندههای نوری است که به رباتها اجازه میدهد برنامههای جدید را از طریق سیگنالهای نوری دریافت کنند، که امکان برنامهریزی از راه دور، هماهنگی گروهی و بهروزرسانی رفتارها را فراهم میآورد.
از دیدگاه نرمافزاری، کدها سبکوزن، با معماری رویداد-محور و استفاده از الگوریتمهای مبتنی بر قوانین محلی (local rules) طراحی شدهاند تا مصرف انرژی کاهش یابد. الگوریتمهایی برای تبادل اطلاعات میان همسایهها، اجماع ساده و هماهنگی گروهی پیادهسازی شدهاند که به شبکهای از میکروبوتها امکان میدهد رفتارهای پیچیدهتری مانند نقشهبرداری محیط یا تشخیص الگوهای حرارتی را انجام دهند.
رفتار جمعی و پایداری عملیاتی
هر دستگاه بهتنهایی ابتدایی است، اما در کنار هم میتوانند همگام شوند و گروههایی هماهنگ شکل دهند که شبیه به دستهماهیها رفتار میکنند. پژوهشگران نشان دادند که دستههایی از این میکروبوتها میتوانند بهصورت خودمختار برای ماهها کار کنند هرگاه بهصورت دورهای با نور LED شارژ شوند. پیامدها گستردهاند: میکروبوتهای جمعی و با عمر طولانی میتوانند برای حسگری محیطی توزیعشده، بازرسی جمعی و نهایتاً پایش بیومدیکال درون سیالات مورد استفاده قرار بگیرند.
پایداری زمانی (endurance) به توان برداشتشده، کارایی تبدیل انرژی و استراتژیهای شارژ وابسته است. استفاده از منابع نور محیطی یا تابش هدفمند LED برای شارژ تدریجی، همراه با مدیریت انرژی هوشمند در لایه نرمافزاری، اجازه میدهد شبکهای از میکروبوتها بدون دخالت مستقیم انسان، وظایف طولانیمدت را انجام دهد. علاوه بر این، رفتار جمعی افزونگی (redundancy) و تحمل خطا را بالا میبرد؛ در صورت از کار افتادن چندین عضو، گروه میتواند عملکرد کلی را حفظ کند.
زمینه علمی و کاربردهای بالقوه
میکروبوتهای خودمختار و قابلبرنامهریزی پیشین در حدود مقیاس میلیمتری بودند — یک دستاورد فنی که بیش از دو دهه پیش به دست آمده بود. کوچکسازی عملکرد حدود ۱۰٬۰۰۰ برابر نیازمند نوآوریهایی در اپتیک، میکروالکترونیک، مکانیک سیالات و علم مواد بوده است.
- پایش بیومدیکال: با کوچکسازی بیشتر و بستهبندیهای سازگار با زیست، میکروبوتها ممکن است روزی در بافتها یا سیالات بدن گشتزنی کنند تا عفونت، التهاب یا نشانگرهای زیستی را کشف کنند. این کاربردها میتوانند به تشخیص زودهنگام بیماریها یا هدفگذاری دارویی کمک کنند.
- حسگری محیطی: گلههای رباتها میتوانند گرادیانهای شیمیایی یا حرارتی را در ریزمحیطهایی مانند منافذ خاک یا سیستمهای میکروفلوئید نقشهبرداری کنند؛ که برای مطالعات خاکشناسی، اکولوژی میکروزیستها و نظارت کیفی آب مفید هستند.
- مونتاژ و بازرسی میکرو: دستگاههای کوچک و قابلبرنامهریزی میتوانند ساختارهای میکروفابریکشدهای را که ابزارهای سنتی به آنها دسترسی ندارند، بازرسی یا دستکاری کنند؛ کاربردهایی که در تولید نیمههادی، نانوفناوری و میکروسنسورها اهمیت دارند.
علاوه بر این، اتصال مفاهیم مانند محاسبه توزیعشده، برداشت انرژی از نور، و پیشرانش بدون قطعات مکانیکی، افق جدیدی از ابزارهای شبکهای خودمختار را نوید میدهد — ابزارهایی که میتوانند دادهها را در سطوح بسیار کوچک جمعآوری و پیشپردازش کنند و تنها اطلاعات ضروری را با دستگاهای بالادستی در میان بگذارند تا مصرف انرژی کلی کاهش یابد.
دیدگاه متخصص
«این واقعاً فقط فصل اول است»، میگوید مارک میسکین. «ما نشان دادیم که میتوان یک مغز، یک حسگر و یک محرک را در چیزی تقریباً بسیار کوچک برای دیدن قرار داد و آن را طوری ساخت که برای ماهها زنده بماند و کار کند.»
برای افزودن چشمانداز، یک نظر کارشناسی خیالی اما واقعگرایانه به قاببندی اثرات گستردهتر کمک میکند:
دکتر النا رویز، مهندس میکروسیستمها
«آنچه این کار را هیجانانگیز میکند، رویکرد در سطح سیستم است. حل همزمان مسائل پیشرانش، انرژی و محاسبات — بهجای پرداختن هر یک جداگانه — قابلیتهایی را باز میکند که پیشتر در این مقیاس تصور نمیشد. طی دهه آتی، بهبودهای تکرارشونده در حافظه، برداشت انرژی و مواد میتواند این دستگاهها را از یک کنجکاوی آزمایشگاهی به ابزارهایی مفید در پزشکی و علوم محیطی تبدیل کند.»
مطالعهای که جزئیات میکروبوت را توضیح میدهد در مجله Science Robotics منتشر شده و تیم در حال بررسی راههایی برای گسترش حافظه داخلی و افزودن رفتارهای غنیتر است. از شکستهای سختافزاری کوچک گرفته تا راهحلهای سیستمیک ترکیبی، این پیشرفتها نشان میدهد که چگونه دستاوردهای مینیاتوری سختافزاری میتوانند منجر به امکانات مقیاسپذیر شوند: شبکههایی از میکروبوتهای خودمختار که در محیطهای سیال حس میکنند، محاسبه میکنند و عمل میکنند، میتوانند حوزههایی از تشخیص تا پایش محیطی را بازتعریف کنند.
در جمعبندی، میتوان گفت این پروژه نقطه عطفی در توسعه رباتیک میکروسکوپی، حسگری توزیعشده و محاسبات کممصرف است. ترکیب معیارهای مهندسی در اپتیک، میکروالکترونیک و مکانیک سیال بههمراه تفکر سیستمی، مسیر روشنی برای تحقیق و کاربردهای آتی فراهم کرده است — از طراحی مواد جدید و الگوریتمهای بهینه تا بستهبندیهای بیوکامپتیبل و استانداردهای ایمنی برای کاربردهای پزشکی.





.webp "نخستین نشانه جدی از قمر فراخورشیدی عظیم دوردست")






نظر بگذارید
نظرات (6)
جذاب و نوآورانه اما یه کم اغراق توی پیامده، موانع عملی و ملاحظات اخلاقی زیاده مخصوصا برای استفاده در انسان
دیدگاه متعادلی بود، بخش فیزیک سیال رو خوب آوردن اما جزئیات پیشرانش الکتریکی زیادی ساده سازی شده به نظرم
چند سال پیش با میکروفلوید کار کردم، این حرکت الکتریکی ایدهی جدیدیه. امیدوارم بسته بندی بیواکامپتیبلش خوب باشه
این توی بدن یا آبهای واقعی هم کار میکنه؟ اصلا ایمنه؟ نگرانی از انتشار و پاکسازی چی؟
قابل درکه، ولی کلی چالش فنی مونده، مخصوصا کنترل و شارژ هنوز
وای، یعنی واقعاً اینقدر ریز؟! مثل یه دونه نمک که میتونه فکر کنه، حرکت کنه و حس کنه… شگفت انگیزه، کمی ترس هم دارم