
10 دقیقه
پژوهشگران نشان دادهاند که امواج صوتی میتوانند برای هماهنگسازی دستههای کوچک رباتها بهکار روند؛ رباتهایی که مانند جمعیتهای زنده رفتار میکنند: همزمان حرکت میکنند، شکل خود را با فضاهای تنگ تطبیق میدهند و حتی پس از آسیب بازسازی میشوند. این کشف که توسط تیمی از دانشگاه Penn State رهبری شده و در Physical Review X منتشر گردیده است، مسیرهای جدیدی برای میکرورباتیک در حوزههای پزشکی، پاکسازی محیطی و کاربردهای دیگر میگشاید و چشماندازهای تازهای برای رباتهای جمعی (روبوتهای جمعی) ارائه میدهد.
مطالعهای جدید به سرپرستی پژوهشگران Penn State برای نخستین بار نشان میدهد که امواج صوتی چگونه میتوانند بهعنوان مکانیسمی برای کنترل رباتهای میکرومتری عمل کنند و امکانات هماهنگی صوتی و همگامی آکوستیک میان واحدهای ساده را آشکار میسازد.
چرا سیگنالهای صوتی برای رباتهای گروهی اهمیت دارند
گروههای زیستی—از خفاشهایی که با اکولوکیشن مسیریابی میکنند تا حشرات که بهصورت گروهی حرکت میکنند—اغلب برای ناوبری و هماهنگی به صدا وابستهاند. الهامگرفته از طبیعت، تیم پژوهشی مدلهایی از میکرورباتها را طراحی کرد که سیگنالهای آکوستیک ساطع و دریافت میکنند تا انسجام جمع را حفظ کرده و بهصورت گروهی هدایت شوند. ارتباط صوتی برجسته است زیرا صدا نسبت به نشانههای شیمیایی با سرعت بالاتر و تضعیف کمتری منتشر میشود؛ این ویژگی آن را به کانالی کارا برای هماهنگی بین دستگاههای توزیعشده و ساده تبدیل میکند و برای میکرورباتها که منابع محاسباتی و انرژی محدودی دارند، گزینهای مناسب است.
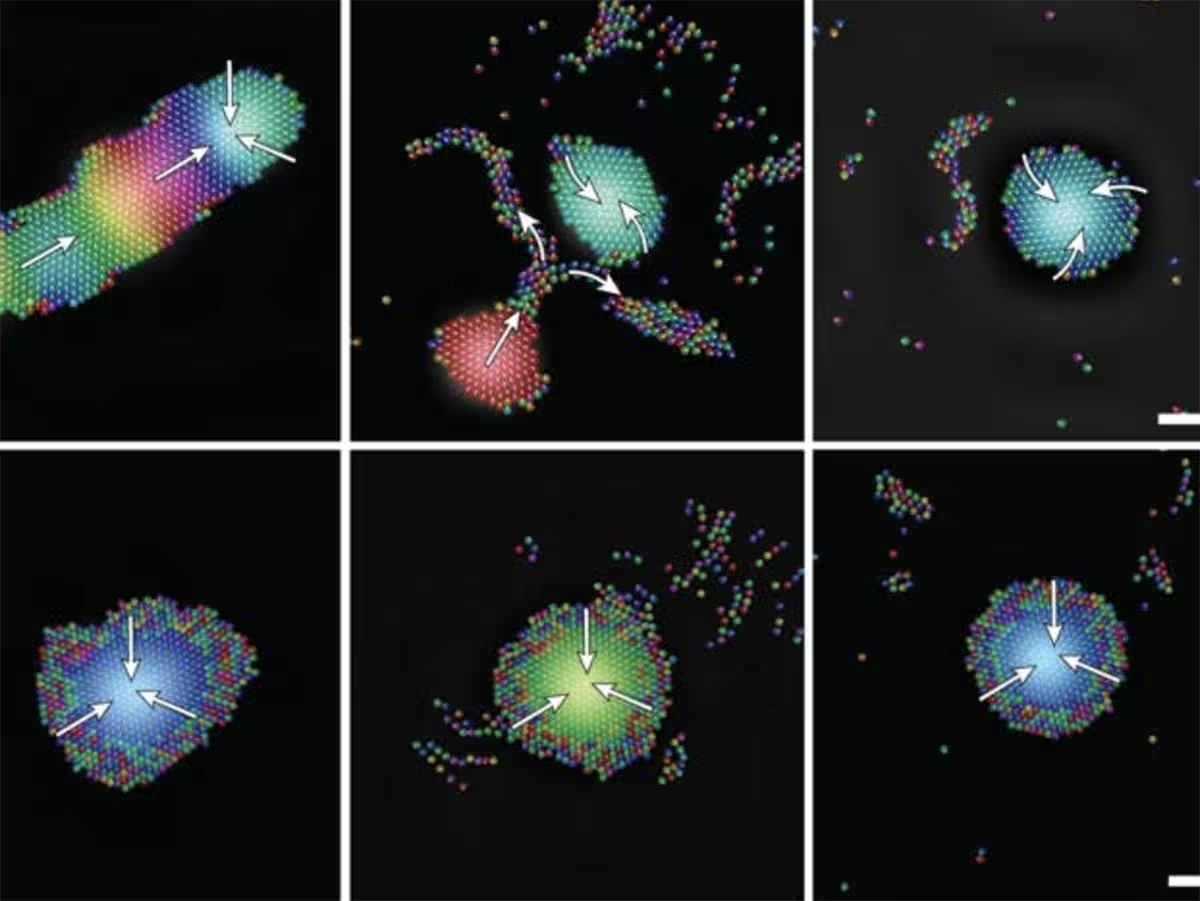
در شبیهسازیهای Penn State، هر عامل سختافزار بسیار حداقلی داشت: یک موتور برای حرکت، میکروفون و بلندگوی کوچک برای تبادل صوتی و یک نوسانگر (اسیلِیتور) برای تنظیم حرکت نسبت به میدان صوتی محلی. با وجود این سادگی، مجموعه رفتارهای پیچیده و نوپدیدی پدیدار شد—تغییر شکل دسته، همگرایی به سمت منابع سیگنال قوی و بازسازمانیابی پس از آشفتگی—رفتارهایی که معمولاً با سیستمهای کنترلی پیشرفتهتر مرتبطاند. این نتایج نشان میدهد که همگامی و خودسازماندهی میتواند از ابزارهای فیزیکی پایه استخراج شود و نه لزوماً از شبکههای پردازشی سنگین.
نحوه عملکرد شبیهسازی: نگاهی زیر کاپوت
تیم از مدل شبیهسازی مبتنی بر عامل (agent-based) برای رصد هزاران واحد خود-ران استفاده کرد. هر میکروربات شبیهسازیشده سیگنال آکوستیکی تناوبی (پریودیک) ساطع میکرد و میدان صوتی محلی تشکیلشده توسط همسایگان را اندازهگیری مینمود. با همگامسازی نوسانگر داخلی خود با فرکانس غالب محلی و حرکت بهسوی قویترین منبع آکوستیک، مجموعهای از واحدهای بسیار ساده خودبهخود به ریوَندهای منسجم و هماهنگ تبدیل شد. این فرایند شامل تعاملات محلی متقابل و قاعدههای رفتاری ساده بود که منجر به تشکیل ساختارهای جمعی شد؛ ساختارهایی که از طریق پارامترهایی مانند دامنه سیگنال، فاصله حسکردن و سرعت پاسخدهی قابل تنظیم بودند.
از آنجا که مدل بر اصول فیزیکی عمومی مبتنی است و نه یک کد اختصاصی و خاص، پژوهشگران استدلال میکنند که پیادهسازیهای آزمایشی با ویژگیهای آکوستیکی و مکانیکی مشابه باید پدیدههای اساسی را بازتولید کنند. به عبارت دیگر: هوش جمعی از بلوکهای ساختمانی ساده پدید آمد—بدون کنترلکننده مرکزی، بدون نقشه دقیق محیط، تنها بازخورد محلی مبتنی بر صدا. این شیوه تأکید میکند که استفاده از فیزیکِ محیط (میدانهای صوتی، تداخل و همگامی فرکانسی) میتواند نقش یک «مغز توزیعشده» ساده اما مؤثر را بازی کند.
برای پژوهشگران، بخش قابل توجه این است که الگوریتمها و قاعدههای رفتاری در شبیهسازی محدود به یک پلتفرم مشخص نبودند؛ پارامترهای فیزیکی مانند سرعت انتشار صوت، میزان تضعیف در محیطها با ویسکوزیته مختلف و دامنه اثر نوسانگرها در شکلگیری رفتار جمعی تعیینکننده بودند. این نکته مسیرهایی برای طراحی تجربی مشخص میکند: انتخاب فرکانسهای آکوستیکی مناسب، طراحی مبدلهای صوتی مینیاتوری و تنظیم الگوریتمهای همگامسازی داخلی هر واحد.
ماموریتهای بالقوه: از داخل بدن تا رودخانههای آلوده
چه چیزی این میکرورباتهای هدایتشده با صدا را مخصوص میکند؟ پاسخ در سازگاری و تابآوری آنهاست. در شبیهسازیها، دستهها از راهروهای تنگ عبور کردند، وقتی جدا شدند دوباره تجمیع شدند و حتی پس از از دست دادن بخشی از واحدها عملکرد کلی را حفظ کردند. این نوع تابآوری میتواند در کاربردهای عملی تفاوتساز باشد، از جمله:
- تحویل داروی هدفمند: ناوگان میکرورباتها میتوانند در کانالهای عروقی حرکت کرده و دارو را در بافتهای هدف متمرکز کنند و در عین حال از نواحی سالم دوری نمایند. در این سناریو، هماهنگی صوتی میتواند برای هدایت دسته به سمت سیگنالهایی که از بافت هدف یا منابع خارجی ساطع میشود، استفاده شود و مصرف انرژی و عوارض جانبی را کاهش دهد.
- اصلاح محیطی و پاکسازی: میکرورباتهای پراکنده ممکن است آلودگیها را در چشماندازهای پیچیده مانند لایههای رسوبی، مجاری آب زیرزمینی یا لولههای گرفتگی تشخیص داده و خنثی کنند. با استفاده از حسگرهای شیمیایی ساده روی بدنه و هماهنگی صوتی برای تقسیم و ترکیب مجدد گروه، میتوان عملیات پاکسازیِ اندازهپذیر و بازپیکربندیشوندهای طراحی کرد.
- نجات و بازرسی: دستههای صوتی کوچک میتوانند سازههای فروپاشیده یا فضاهای صنعتی تنگی را کاوش کنند که دسترسی انسان یا رباتهای بزرگتر به آنها دشوار است. توانایی عبور از شکافها، همگامشدن برای تقویت سیگنال در نقاط حساس و بازسازی بعد از آسیب، برای مأموریتهای امداد و بازرسی حیاتی خواهد بود.
برای هر یک از این مأموریتها، پارامترهایی مانند اندازه واحدها، دامنه فرکانسی مناسب، مصرف انرژی هر گره، تحمل نویز محیطی و قابلیت هماهنگی با حسگرهای شیمیایی یا تصویری باید بهدقت تعیین شود. علاوه بر این، ارتباط بین طراحی فیزیکی ربات (مبدل صوتی، محرک حرکت، مواد بدنه) و پروتکلهای رفتاری (قاعدههای همگامسازی و مهاجرت) نقش کلیدی در موفقیت عملی خواهد داشت.
زمینه علمی: ماده فعال و هوش نوپدید
این یافتهها به میدانی در حال رشد به نام «ماده فعال» (active matter) وارد میشوند؛ حوزهای که بررسی میکند چگونه واحدهای خودران متعدد—خواه سلولها، باکتریها یا ذرات مصنوعی—الگوها و عملکردهای در مقیاس بزرگ تولید میکنند. بهطور تاریخی، پژوهشگران برای برنامهریزی تعاملات در ماده فعال به سیگنالدهی شیمیایی متکی بودهاند. نشاندادن کنترل آکوستیکی ابزارهای جدیدی به جعبهابزار میافزاید: صوت میتواند مسافت بیشتری را سریعتر طی کند و سختافزار آکوستیکی در مقیاسهای کوچک میتواند بسیار ساده و کممصرف باشد.
به گفته هدایتکننده مطالعه، Igor Aronson، این رویکرد میتواند میکرورباتهایی تولید کند که هم هوشمندتر و هم مقاومتر هستند در حالی که پیچیدگی داخلی کمی دارند. به جای بارگذاری هر واحد با پردازندهها و حسگرهای متعدد، طراحان میتوانند از فیزیک—میدانهای آکوستیک و همگامی—برای رسیدن به رفتارهای هماهنگ در مقیاس بزرگ بهره برند. این تغییر پارادایم از محاسبات متمرکز به «محاسبه فیزیکی توزیعشده» میتواند هزینهها، مصرف انرژی و پیچیدگی تولید را کاهش دهد و امکان ساخت شبکههای عظیم از میکرواژنتهای ساده را فراهم سازد.
از دید مفهومی، همگامی فرکانسی و قفلسازی فازی (phase-locking) میان نوسانگرهای محلی مشابه پدیدههایی است که در سیستمهای بیولوژیک مشاهده میشود؛ اما پیادهسازی این پدیده در سختافزار میکرومتری مستلزم بررسی نحوه تعامل امواج صوتی با محیطهای سیال، سطوح جذب صوت و تداخل امواج از منابع متعدد است. مدلهای ریاضی مانند معادلات همگامی کاهن-اشمیت (Kuramoto) و شاخصهای نظم (order parameters) در تحلیل پایداری جمع و آستانههای همگامسازی میتوانند کاربردی باشند.
چالشها پیش از ساخت دستگاههای واقعی
ترجمه از شبیهسازی به دستگاههای آزمایشگاهی و میدانی نیازمند حل مسائل عملی است: مهندسی فرستندهها و میکروفونهایی که در مقیاس میکرو بهطور قابلاعتماد کار کنند، تضمین سطوح صوتی ایمن برای بافتهای زیستی، و توسعه مواد و روشهای رانش که در شرایطی مانند گرادیانهای شیمیایی یا جریانهای آشفته قابلعمل باشند. پژوهشگران باید موارد زیر را نیز در نظر بگیرند:
- طراحی مبدلهای آکوستیکی مینیاتوری با بازده بالا و مصرف انرژی پایین.
- تضمین ایمنی بیولوژیکی و بررسی اثرات صوت بر بافتها در فرکانسها و شدتهای مورد نظر.
- استراتژیهای انرژی (ذخیره انرژی، برداشت انرژی محیطی، شارژ بیسیم) برای افزایش زمان عملیاتی گرهها.
- مواد و پوششهای مقاوم در برابر خوردگی، رسوب یا بیوفیلم در محیطهای طبیعی و داخل بدن.
- کنترل در محیطهای ناهمگن و جلوگیری از تداخل ناخواسته بین چندین دسته یا سرویسدهندههای صوتی در مجاورت هم.
علاوه بر این، چالشهای اندازهگیری و ارزیابی شامل تعریف معیارهایی برای سنجش موفقیت—مانند مقیاسپذیری، تابآوری در برابر خرابی گرهها، هزینه انرژی برای هماهنگی و سرعت واکنش—ضروری است. مسائل مهندسی مانند همگرایی الگوریتمها در حضور نویز، حساسیت به خطاهای سنسور و پارازیتهای صوتی محیطی نیز باید بهصورت تجربی بررسی شوند. در نهایت، مقررات و استانداردهای ایمنی برای بهکارگیری چنین سیستمهایی در محیطهای طبیعی و پزشکی باید توسعه یابد.
دیدگاه کارشناسان
دکتر مایا پاتل، مهندس رباتیک متخصص در سیستمهای جمعی، اشاره میکند: "زیبایی واقعی هماهنگی آکوستیکی در سادگی آن است. نیازی به محاسبات سنگین در هر گره ندارید—فقط اتصال مناسب بین انتشار، تشخیص و حرکت کافی است. با این حال، ساخت مبدلهای میکروسکوپی که هم مقاوم و هم کممصرف باشند، چالش بزرگ بعدی است. اگر بتوانیم این مشکل را حل کنیم، دامنه کاربردها—از درمانهای هدفمند پزشکی تا حسگری محیطی—بسیار گسترده خواهد شد."
نظراتی از این دست نشان میدهد که جامعه مهندسی بر ضرورت کاهش هزینه و افزایش قابلیت تولید تاکید دارد و همچنین بر اهمیت آزمایشات میدانی و تکرارپذیری نتایج شبیهسازی در شرایط واقعی تاکید میکند. تحلیل هزینه-فایده، مطالعات قابلیت اطمینان و طراحی برای تولید (design for manufacturability) از جمله گامهای عملی هستند که باید زودهنگام مورد توجه قرار گیرند.
چه چیزی در پیش است
کارهای آینده احتمالاً ترکیبی از آزمایشها با مؤلفههای صوتی کوچکتر و مدلهای محیطی واقعیتر خواهند بود. تیمهای بینرشتهای—با همکاری فیزیکدانان، مهندسان، زیستشناسان و دانشمندان مواد—برای ساخت نمونههای اولیه و آزمون عملکرد در شرایط مربوطه لازماند. آزمایشهای پیشنهادی میتوانند شامل رهاسازی دستهای از واحدهای صوتی در کانالهای میکروفلوئیدی برای بررسی عبور از پیچوخم، سنجش واکنش به موانع و ارزیابی بازسازی پس از آسیب باشند.
اگر دستههای آکوستیکی بتوانند بهطور فیزیکی همانطور که در شبیهسازیها ظاهر شدهاند محقق شوند، آنها میتوانند مسیر عملی و کمپیچیدگی برای میکرورباتهای هوشمند ارائه کنند که بهصورت جمعی وظایفی را انجام میدهند که یک دستگاه واحد قادر به انجام آن نیست. این رویکرد نویدبخشِ فراهمسازی شبکههایی از میکرورباتها برای کاربردهایی است که نیازمند انعطافپذیری، مقیاسپذیری و مصرف انرژی پاییناند.
در عین حال، پیشبرد این فناوری مستلزم آزمایشهای نظاممند، توسعه استانداردهای ایمنی و تعامل با ذینفعان حوزه سلامت و محیطزیست است تا اطمینان حاصل شود که نمونههای اولیه نه تنها از منظر فنی موفقاند بلکه از نظر اخلاقی و قانونی نیز پذیرفتنی باشند.
منبع: scitechdaily
ارسال نظر