6 دقیقه
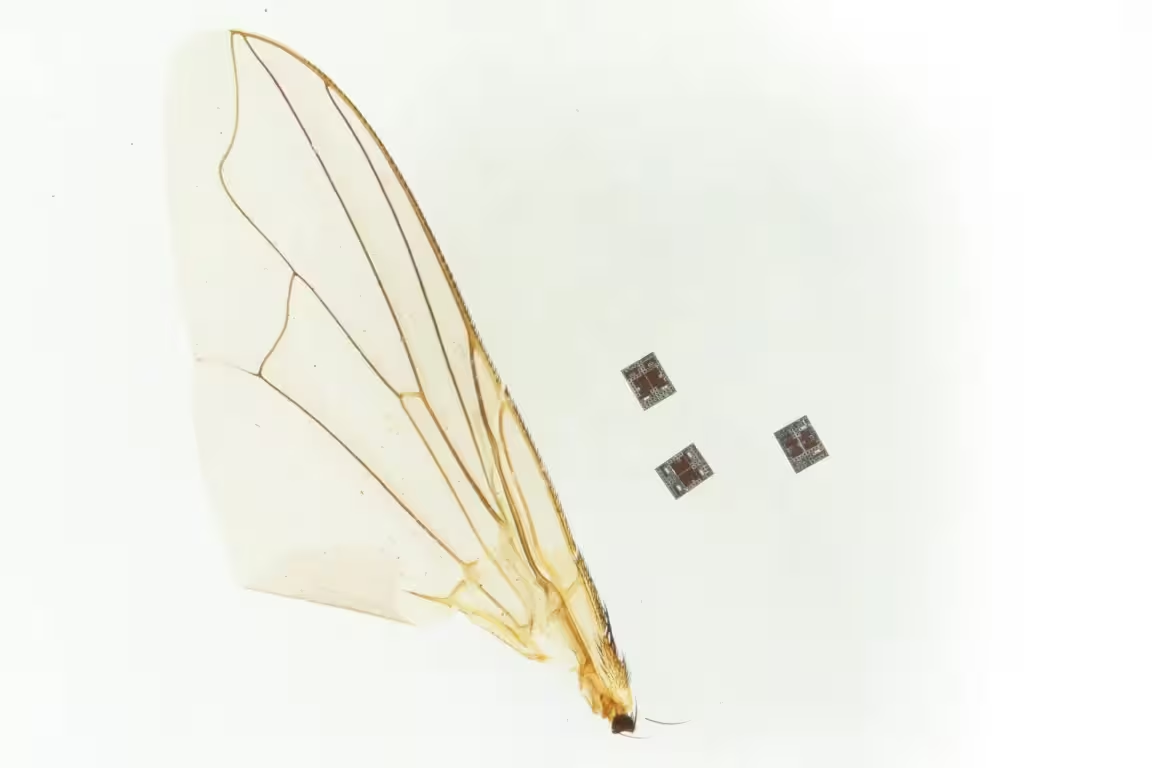
دانشمندان دانشگاه پنسیلوانیا و دانشگاه میشیگان رباتی زیرمیلیمتری ساختهاند که در قالبی کوچکتر از یک دانه نمک، رایانه، حسگرها و سامانه پیشرانش را یکپارچه کرده است. این پژوهش که در نشریه Science منتشر شد و توسط واشینگتنپست گزارش گردید، نشان میدهد این میکروربات میتواند راهنمایی برای توسعه ابزارهای پزشکی آینده باشد که درون بدن انسان عمل میکنند. ساخت این ربات زیرمیلیمتری خودمختار نقطه عطفی در حوزه رباتیک پزشکی و میکرورباتها به شمار میآید و بحثهایی درباره کاربردهای بالینی، چالشهای فنی و مسیر پژوهشیـنظارتی پیش رو به همراه داشته است.
میکرو رباتی که میبیند، میاندیشد و حرکت میکند
این دستگاه جدید در مقیاس نانو قرار ندارد؛ اما در اندازه زیر میلیمتر بسیار کوچک است و از لحاظ ابعادی در برخی اندازهها با یک دانه نمک گرانول نمک طعام قابلمقایسه و حتی کوچکتر است. مارک میسکین (Marc Miskin)، دانشیار مهندسی برق و سیستمها در دانشگاه پن و از نویسندگان مقاله، آن را «اولین ربات بسیار کوچک که میتواند حس کند، بیندیشد و عمل کند» توصیف کرده است—ترکیبی از پردازش درونی (on-board computation)، تبدیل انرژی و حرکت در یک بسته واحد.
پروتوتایپ فعلی هنوز در مرحله آزمایشی است و برای استفاده در بدن انسان تأیید نشده است. دیوید بلااو (David Blaauw)، استاد دانشگاه میشیگان و یکی از نویسندگان، به واشینگتنپست گفته است که اگر کاربردهای عملی ظرف یک دهه ظاهر شوند، تعجب نخواهد کرد. این خوشبینی محتاطانه نشاندهنده هر دو جنبه است: وعدههای بالقوه فناوری و موانع فنی قابلتوجهی که باید عبور شود.
چگونگی عملکرد و اهمیت آن
به طور تاریخی، بسیاری از میکرورباتها برای حرکت یا هدایت به سیستمهای کنترل خارجی وابسته بودهاند—میدانهای مغناطیسی دور، نورشناسی با فیبر نوری متصل یا الکترونیک بیرونی—که این وابستگی توانمندیهای خودمختاری را محدود میکرد، چرا که پردازش دادههای محلی وجود نداشت. نوآوری اصلی در این نمونه، خودگردانی محلی در مقیاس میکرو است: ربات دارای یک رایانه کوچک، حسگرها و یک محرک است و از سلولهای فتوولتائیک مینیاتوری برای برداشت انرژی هم برای محاسبات و هم برای پیشرانش استفاده میکند. ترکیب «حسگر + منطق پردازشی + پیشرانش» در سطح زیرمیلیمتری تغییرات اساسی در طراحی و کاربرد میکرو رباتها ایجاد میکند و امکان واکنش به شرایط محلی را بدون کنترل دائمی خارجی فراهم میسازد.
برای درک اهمیت این پیشرفت، باید چند عنصر فنی و کاربردی را در نظر گرفت: یکپارچهسازی مدارهای مجتمع با حساسیت بالا در فضای بسیار محدود، مدیریت انرژی و تبدیل نور به برق با سلولهای بسیار کوچک، و طراحی محرکهایی که بتوانند با توان محدود حرکتهای قابلاتکایی تولید کنند. این ترکیب نیازمند توازن بین مصرف انرژی، اندازه تراشهها، جنس مواد و سازگاری زیستی (بیوکامپتیبیلیتی) است. به همین دلیل، پژوهشگران از مفاهیمی در لبههای میکروفناوریهای MEMS، تکنیکهای ساخت مبتنی بر سیلیکون و لایهنشانی فلزی برای الکترودها و اجزای پایدار استفاده کردهاند.
مواد و طراحی
- ساختار: از سیلیکون ساخته شده و دارای لایههای فلزی شامل پلاتین و تیتانیوم برای الکترودها و قطعات مقاوم.
- نیرو: سلولهای خورشیدی مینیاتوری نور را به برق تبدیل میکنند تا پردازنده داخلی و سامانه حرکت را تغذیه کنند.
- حسگرها و منطق: الکترونیک فشرده به دستگاه اجازه میدهد محیط خود را حس کرده و بدون نیاز به کنترل بیرونی مداوم تصمیمات ساده بگیرد.
در سطح میکرون (یکمیلیونیم متر) فعالیت این رباتها زمینه فیزیکی مشترکی با بسیاری از ساختارهای زیستی—مانند سلولها، ریزرگها و ساختارهای بافتی—ایجاد میکند. این شباهت مقیاسی، درهای تازهای را برای کاربردهای پزشکی باز میکند از جمله تحویل داروی هدفمند (targeted drug delivery)، تعمیر آسیبهای میکروسکوپی بافت، تشخیصهای موضعی و بازرسی مناطق دشوار در داخل بدن. به عنوان مثال، میتوان تصور کرد رباتهای خودمختار ریز به نقاطی در ریزشبکههای عروقی یا مسیرهای کمدسترس دستگاه گوارش برسند و دادههای تشخیصی جمعآوری یا دارو رها کنند.
با این حال، چالشهای عمدهای پابرجا هستند: تأمین انرژی برای میکرو رباتها در محیطهای داخلی با نور کم، تضمین سازگاری زیستی و عدم تحریک ایمنی، تولید انبوه با هزینه معقول و توسعه راهبردهای کنترل و بازیابی امن برای استفاده بالینی. برای مثال، سلولهای فتوولتائیک در محیط داخلی بدن که نور محدودی دریافت میکند، به تنهایی ممکن است کفایت نکنند و نیاز به روشهای مکمل مانند شارژ القایی، انتقال بیسیم انرژی با میدانهای نزدیک، حسگرهای کممصرف یا مواد شیمیایی بالقوه سوختی وجود دارد.
همچنین باید به مسائل نظارتی و اخلاقی توجه شود. قبل از ورود به کاربردهای بالینی، آزمایشهای پیشبالینی در مدلهای حیوانی و ارزیابیهای گسترده زیستسازگاری و سمیت لازم است. ملاحظات مربوط به ایمنی بیماران، کنترل دقیق مسیر حرکت، قابلیت بازیابی رباتها یا طراحیهای قابلتجزیه و جذب بیولوژیک (biodegradable) باید در پروتکلهای توسعه و آزمون در اولویت قرار گیرند. روندهای نظارتی مانند فرآیندهای ارزیابی سازمانهایی مانند FDA یا نهادهای همتای بینالمللی نیازمند دادههای جامع درباره عملکرد، پایداری و ایمنی این سامانهها خواهند بود.
پژوهشگران بر این نکته تأکید میکنند که این پروتوتایپ یک گام بنیادی است و نه محصول نهایی.، چرا که با یکپارچهسازی حسگری، محاسبه و عملگر در قالب یک دستگاه زیرمیلیمتری، توازنهای طراحی که قبلاً میکرو رباتها را مجبور میکرد بین حالتهای منفعل یا کنترلشده از خارج نوسان کنند دگرگون شده است. این تغییر معمارانه مسیر طراحی میکرورباتهای مستقلتر و هوشمندتر را هموار میسازد.
در سالهای آینده، مهندسان و دانشمندان مواد بر بهبود برداشت انرژی (energy harvesting)، افزایش دقت حسگری، ارتقای ماد هها و بهینهسازی روشهای ساخت برای انتقال از نمایشهای آزمایشگاهی به وظایف عملی تمرکز خواهند کرد. اگر این مسیر موفقیتآمیز باشد، میکرورباتهای خودمختار میتوانند به کلاس جدیدی از ابزارهای پزشکی تبدیل شوند: ماشینهای بسیار کوچک که در بدن حرکت میکنند، به شرایط محلی پاسخ میدهند و درمانها را در نقاطی ارائه میکنند که ابزارهای متعارف قادر به رسیدن یا عملآوری نیستند.
در کنار کاربردهای بالینی واضح، توسعه چنین سیستمهایی سبب پیشرفت در حوزههای مرتبط خواهد شد: بهبود فناوری CMOS برای مصرف پایین، طراحی مدارهای منطق کممصرف برای تصمیمگیری محلی، الگوریتمهای ساده و سبک برای کنترل حرکت، و روشهای نوین بستهبندی میکروسکوپی که هم حفاظت الکترونیک و هم تماس بیولوژیک را مدیریت کنند. همچنین کار بر روی مفهوم «گله رباتها» (robotic swarms) در مقیاس میکرو میتواند امکاناتی مانند تقسیمکار میان چند میکروربات برای تشخیص گستردهتر یا رهایش ترکیبی داروها فراهم آورد.
به طور خلاصه، این پیشرفت نه تنها یک دستاورد مهندسی در مینیاتوریسازی سیستمهای رباتیک است، بلکه چارچوب مفهومی را نیز گسترش میدهد: رباتهایی که میتوانند دادهی محلی را پردازش کنند، با نیروی برداشتشده از محیط کار کنند، و واکنشهای محلی انجام دهند، بدون اینکه همواره به زیرساختهای بزرگ و کنترل از راه دور متکی باشند. این ویژگیها برای توسعه کاربردهای عملی در پزشکی دقیق (precision medicine)، تشخیص درجا (point-of-care diagnostics) و درمان هدفمند اهمیت ویژهای دارند.
در نهایت، مسیر تبدیل یک نمونه آزمایشگاهی به ابزار بالینی شامل همکاری میانرشتهای گستردهای است: مهندسان رباتیک و میکروفناوری، بیومدیکالها، زیستشناسان، پزشکان بالینی، مهندسان مواد و نهادهای تنظیمگر باید با هم کار کنند تا این فناوری به شکلی ایمن، مقرونبهصرفه و کاربردی وارد جریان مراقبتهای بهداشتی شود. این همکاریها همچنین میتوانند به تدوین استانداردها و چارچوبهای اخلاقی برای استفاده از میکرورباتهای داخلبدنی بینجامد—اطمینان از شفافیت، رضایت آگاهانه بیمار، و حفاظت از حریم خصوصی دادههای جمعآوریشده در سطح میکرو.
چشمانداز فناوری شامل رباتهای خودمختار میکروسکوپی است که میتوانند بهصورت هماهنگ عمل کنند، دادههای بیدرنگ را برای پزشکان ارسال نمایند، و تصمیمات درمانی پایهای را در محل اعمال کنند. این سامانهها میتوانند در کنار ابزارهای کنونی کار کنند و در نهایت برای مواردی که روشهای موجود ناکافی هستند، گزینههای درمانی و تشخیصی جدیدی فراهم آورند.





.webp "نخستین نشانه جدی از قمر فراخورشیدی عظیم دوردست")






نظر بگذارید
نظرات (5)
تصورش جالبه، یاد گلههای رباتیایی افتادم که تو آزمایشگاه دیدم؛ ولی هزینه و ایمنی اولویت داره، تا بتونن وارد کار بالینی بشن
خیلی شیکه اما بنظرم دارن چیزو کمی باد میکنن، تولید انبوه و بیو سازگاری واقعا سخته. امیدوارم به راهحل برسن
آیا اصلا نور داخل بدن برای سلولهای خورشیدی کافیه؟ یا یه دهه دیگه هم طول بکشه تا عملی شه؟
این پیشرفت منطقیه ولی مشکل انرژی تو بدن جدیه، باید روشهای شارژ بیسیم بهتر شه تا واقعیت پیدا کنه
وای یعنی یک دانه نمک... رباتی که میبیند و فکر میکنه؟ شگفتانگیزه ولی کمی هم ترسناک, مگه میشه؟